DDRH-DDVL
1995-96 nasce questo progetto come primo concetto di elicottero ibrido, meglio multirotore, che impiegava motori elettrici per il volo ed un generatore pe la produzione di energia elettrica: una unità APU che produce l’energia elettrica sufficiente ad alimentare l’intero sistema, una sorta di piccola centrale elettrica. Non vi è stato uno stimolo unico di partenza per lo sviluppo di questo progetto, esso viene in realtà concepito secondo una sequenza di eventi diversi che come un puzzle di tessere legate ad eventi avvenuti o ad esperiente di pilota associandole tra loro hanno preso corpo in questo unico velivolo.

E'
spesso da piccole episodi che nascono delle idee alternative, e questo
ha influenzato il mio modo di pensare al volo Verticale nel futuro Durante
l’imbarco per un volo di linea mi trovai ad attraversare il piazzale
di parcheggio dell’aeromobile su cui stavo salendo assieme ad altri
passeggeri. In fila con le nostre piccole cose verso la scaletta di coda
osservavo quasi ipnotzzato il Boeing 767, alla ricerca
di qualche dettaglio nuovo. Mi stavo dirigendo proprio in quella direzione
quando il suono del generatore di bordo attrasse la mia
attenzione. Un piccolo tubo di scarico dei gas riscaldava l’aria
ed emetteva uno strillo sordo che era prodotto dalla turbina a gas di
un APU: un generatore di bordo.
Questo dispositivo di alimentazione è sempre alloggiato nel troncone
di coda e fu proprio in quel momento che si accese come un lampo la vecchia
e intermittente luce "archimedica", che illuminava la soluzione
finale al mio progetto di elicottero elettrico
a rotori intubati a
cui lavoravo già da qualche anno senza successo di continuità.
Ovviamente conoscevo già da tempo la funzione e la struttura degli APU (Auxiliary Power Unit); alcuni elicotteri di grandi dimensioni ne sono provvisti, ma non avevo mai pensato ad un impiego diverso di questo dispositivo, per esempio adattandolo al mio elicottero elettrico come avrei fatto da quel momento per quasi tutti i progetti a venire fino al CellCraft. Avevo trovato il sistema di alimentazione ideale per la mia macchina e per tutte quelle a venire, una sorta di perfetta centrale elettrica che avrebbe risolto tutti i problemi che assillavano la mia immaginazione.

C’era un nostro collega di corso, un ragazzo giapponese, Makoto Higarashi che spesso rientrando dal Giappone ci sottoponeva ad una sorta di quiz invitandoci ogni volta ad indovinare lo scopo di uno dei suoi giocattoli tecnologici giapponesi .
Un giorno portò un piccolo monopattino elettrico pieghevole che era contenuto in una piccola valigetta, si spiegava con un paio di semplici manovre e si poteva andare in giro per qualche ora divertendosi. Ed un mattino ci siamo divertiti tra noi piloti a gironzolare giù nel parcheggio dell’eliporto alternandoci alla guida di quel piccolo ordigno elettrico.

Un oggetto simile l’ho visto apparire alcuni anni dopo anche in Italia, ma fu quell’episodio che stimolò la prima idea di elicottero elettrico e da allora cominciai a lavorare ad un prototipo, partendo da un R22 che divenne in seguito tutt’altra cosa.
L’idea ovviamente che immaginavo ed abbozzavo con le mie penne colorate era di un elicottero elettrico, che impiegasse dei rotori collegati a motori elettrici, alimentati forse da un sistema di batterie o altra fonte che producesse elettricità. L'immaginazione è una bella proprietà della nostra specie, ma deve possibilmente avvicinarsi ad una realtà possibile anche se ad anni di distanza dall'idea originale. Mi rendevo conto che la cosa era impossibile in quegli anni, poichè le batterie di cui avevo bisogno non esistevano ancora e comunque sarebbero state pesantissime ed avuto un’autonomia brevissima, inoltri motori elettrici con un rateo Potenza/Peso nessuno ancora li aveva sviluppati, questi aspetti erano la linea sottile che faceva vacillare i miei progetti.
Alcuni anni dopo però la risposta non venne dai miei fogli e dalle mie penne biro, ma dalla coda di un B737.

L’APU invece è formato da un piccolo motore a turbina accoppiato ad un generatore elettrico il quale è collegato ad una sistema di controllo e distribuzione della potenza elettrica che viene "iniettata" attraverso un labirinto di cavi in tutta la rete elettrica dell’aeromobile. Questa piccola centrale elettrica autonoma viene tenuta in moto fino a dopo il decollo per poi essere disattivata durante il volo, poiché i motori principali forniranno la potenza necessaria all’aeromobile inseguito, gli APU verranno poi riavviati poco prima dell’atterraggio o una volta a terra.
Un ulteriore punto a mio vantaggio era l'evoluzione informatica sia nel software che nell'hardware, oltretutto la continua miniaturizzazione dei componenti sembrava inarrestabile. Da qualche anno i personal computer e software di qualsiasi tipo cominciavano ad invadere lentamente la vità quotidiana di tutti, incluso la mia che fino ad allora mi ero limitato a macchine che utilizzavano solo il DOS come sistema operativo.
La
grafica nel 1996 era sempre più elaborata ed i processori e le
memorie sempre più avanzati. Si poteva pensare ad un dispositivo
capace di gestire l’intero sistema composto da APU/electro-rotore
in maniera efficiente, gestito attraverso un sistema digitale ed un apposito
software dedicato. Dunque la mia idea era ed è sempre stata sin
dal principio quella di utilizzare un sistema composto da una generatore
a turbina, connesso attraverso un sistema elettronico di controllo digitale
a dei motori elettici, questi ultimi montati su rotori indipendenti. Tale
soluzione mi avrebbe permesso di progettare una macchina piuttosto interessante,
priva di organi di trasmissione complessi e pesanti, sostituiti da cavi
elettrici, che avesse offerto una serie di caratteristiche particolari
se non uniche da molti punti di vista se confrontate ai contemporanei
elicotteri di cui io stesso ero pilota e conoscevo molto bene.

Il
DDRH/DDVL nasce ovviamente
in buona parte da questa prospettiva poiché il secondo fattore
che ritenevo di interesse era la rivisitazione
del cockpit. Come pilota trovavo spesso “l’ambiente
di lavoro” il cockpit tanto familiare ed a volte scomodo o sconveniente,
soprattutto dal punto di vista ergonomico.
Troppi interruttori disseminati ovunque, spie e tantissimi indicatori
ad ago ormai obsoleti e superati e che affaticano le operazioni di scannerizzazione.
La grafica ed i computer ancora una volta potevano aiutare a risolvere
problemi di natura architettonica ed interattiva tra il pilota e la
macchina.
Perché riempire in pannello strumenti di indicatori elettromeccanici
a lancette di vario tipo, quando le informazioni dei motori o dei sistemi
di navigazione possono essere riassunte semplicemente, proiettandole
su di un unico schermo a cristalli liquidi? (Tecnologia già disponibili
a quel tempo)
Il nuovo concetto di cockpit era la radice di questo progetto, poiché
come già scritto, il mio obbiettivo iniziale era quello di ridisegnare
l’intera cabina di comando di un elicottero sin dal principio,
per poi andare oltre fino alla macchina stessa, sempre più elaborata
come fu poi più tardi attraverso i progetti CellCraft.
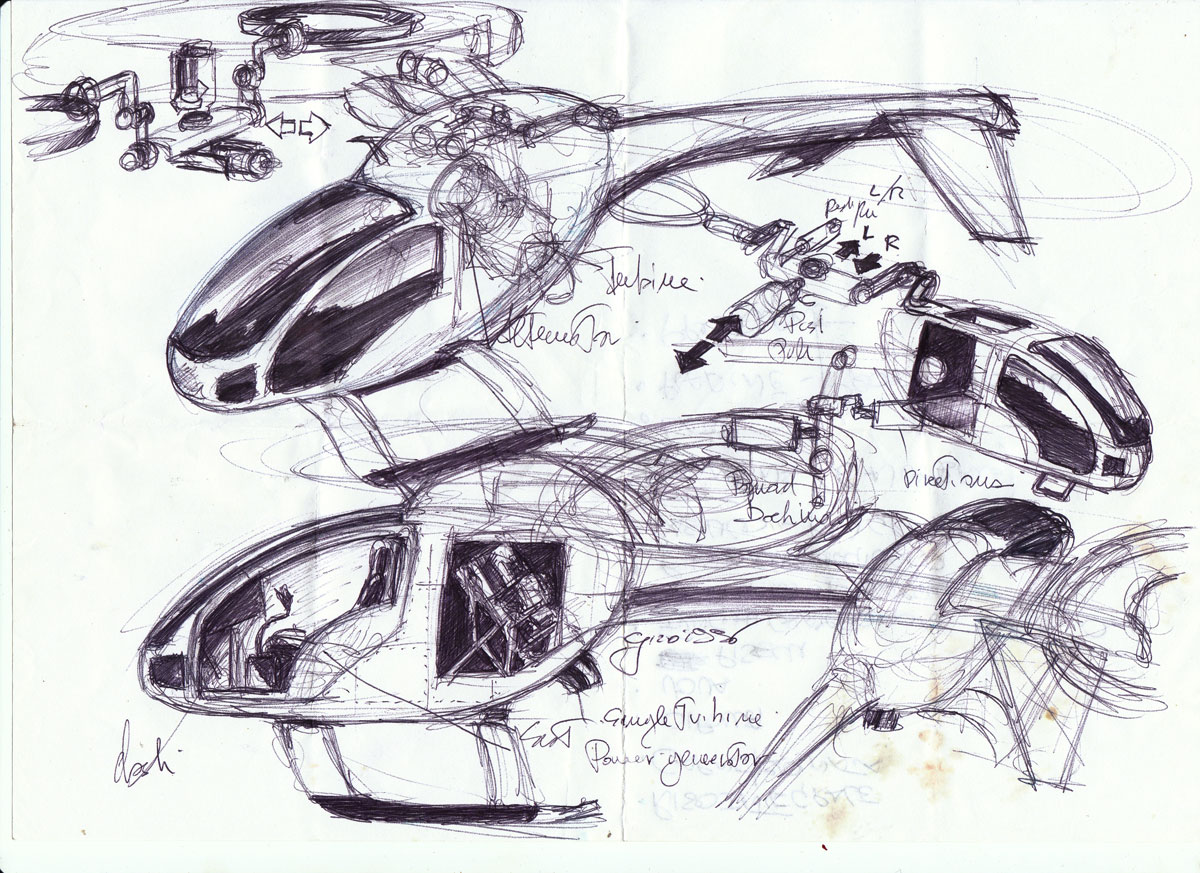
Elettronica
Il cockpit del DDRH era dotato di un unico display LCD che proiettava le informazioni principali - sia relative alla navigazione sia ai parametri Generatore/Motori -attraverso delle rappresentazioni grafiche semplici ed intuitive. La versione successiva aggiornata alcuni anni fa, il DDVL è invece provvista di un sistema piu complesso ed innovativo, ma in buona sostanza non lontano dal progetto originale del 1996. Tuttavia al tempo del primo progetto (DDRH) il display non era ancora di tipo tattile come oggi conosciamo tale tecnologia, sebbene alcune funzioni di base potevano essere attivate premendo alcune zone dello schermo. Lo schermo principale era rivestito di una pellicola trasparente particolare a reticolato elettrico, che permetteva l’attivazione On-Off di numerose funzioni. Una seconda consolle frontale con degli interruttori assicurava la gestione di altri sistemi della macchina. Il cockpit era diventato un ambiente compatto e semplice da gestire, proprio come lo intendevo sin dall’inizio, sebbene questi era ancora lontano dall’idea che più tardi - con la serie CellCraft - si svilupperà, con schermi tattili e software interattivi piuttosto complessi.
Il DDRH era dotato di un piccolo turbogeneratore capace di erogare una potenza di circa 240kw) 100% di potenza erogata, mentre gli elettro-motori elettrici alloggiati in coppia (DDRH) o singoli in ogni gondola (DDVL), potevano erogare una potenza massima non superiore ai 220kw (295Cv) ciascuno più che sufficienti a garantire il volo della macchina potendo contare su prestazioni di ottima qualità.
Il sistema di controllo digitale era alloggiato in un compartimento centrale che includeva un inverter ed una batteria speciale capace di assicurare un volo costante tra i 7 ed i 10 minuti. Questo accumulatore era progettato per garantire alla macchina un eventuale atterraggio di emergenza in tutta sicurezza in caso di guasto improvviso del sistema turbo-generatore principale.

Le pale dei rotori erano in carbonio con anima in alluminio, montate su un cuscinetto articolato che garantiva la variazione del passo delle pale collettivo che avveniva attraverso un meccanismo elettro-controllato nascosto all’interno del disco superiore de due rotori.
Il sistema di alimentazione dei motori avveniva attraverso un dispositivo digitale che iniettava impulsi elettrici a frequenza variabile ai motori trifase ad induzione. Questo garantiva una precisione di rotazione ed una perfetta e costante potenza scaricata sui rotori, inoltre il sistema di controllo - più tardi denominato AFC (Automatic-Flight-Control) - era capace di variare la potenza indipendentemente su ogni motore a seconda dell’assetto che la macchina assumeva, in modo da garantire la stabilità dell’elicottero in volo.
Il DDRH/DDVL era una macchina monoposto, tuttavia l’alloggio del pilota era piuttosto comodo e permetteva una visibilità ampia attraverso due vetri laterali, quello di destra apribile per permettere l’accesso al cockpit e l’altro di sinistra fisso. Tutti i comandi e le leve: quella di comando collettivo; direzionale e la pedaliera, erano servo assistite mediante dei sistemi elettromeccanici raddoppiati con circuiti indipendenti.
I
rotori del DDRH/DDVL hanno una struttura molto diversa
da quella di un comune elicottero. Il rotore ha un movimento basculante
che può raggiungere una escursione massima in avanti fino a 15°
ed all’indietro di 6°. Il rotore non è
assolutamente provvisto di comando ciclico, ma solo di passo collettivo.
Il movimento laterale avveniva attraverso la variazione collettiva dei
due rotori che producevano una spinta diversa tra loro. Per poter spostare
la macchina lateralmente, inclinando la leva di comando direzionale (non
più ciclico) il sistema di controllo ridurrà il
passo collettivo del rotore da un lato, aumentando quello del lato opposto.
Da qui un problema legato alla coppia di reazione che produceva anche
una rotazione della macchina sull'asse verticale, che però veniva
compensata con una leggera rotazione opposta dei due rotori che compensavano
questo problema. L'aumento della spinta di un rotore rispetto al'altro
causava uno spostamento laterale della macchina in una data direzione.
Il movimento traslato in avanti invece avveniva inclinando i due rotori
parallelamente in avanti in modo tale che la spinta creava un vettore
risultante che spostava la macchina in quella direzione. Vi era anche
la possibilità di variare la rotazione dei rotori per una limitata
percentuale, ma questo avveniva in condizioni particolari, laddove veniva
richiesta una potenza eccessiva o per compensare eventuali variazioni
di assetto. Questo lavoro relativamente complesso avveniva attraverso
il computer di controllo principale che gestiva sia gli elettro-rotori
che il Generatore elettrico.

All’estremità di ogni braccio erano montati due motori trifase in serie sovrapposti (DDRH) oppure un motore flat di nuova generazione (DDVL) i quali erano collegati a loro volta al disco rotore penta-pala provvisto di sistema di articolazione collettiva. I motori erano raffreddati ad aria attraverso una presa anteriore che si apriva nella parte frontale della gondola elettrica (DDRH) oppure autoventilati (DDVL). Sulla testa dei rotori (DDRH) o all base (DDVL) vi era inserito un meccanismo elettromeccanico di variazione del passo collettivo, molto preciso e rapido.
Il DDRH è stato l’inizio di una serie di progetti molto indicativi: il CellCraft tra i più importanti. Questo progetto mi ha portato man mano nel tempo a coniugare la mia esperienza diretta di pilota, con quella di progettista e designer aeronautico. Il nocciolo più importante in ogni caso comune a tutti i progetti è la combinazione tecnologica tra elettronica, informatica e sistemi elettrici, con l'obbiettivo di eliminare o ridurre al minimo fattore la presenza di organi meccanici, che diversamente avrebbero reso complessa e costosa la costruzione di una macchina simile, come lo è ad esempio il Convertiplano.
Oggi la tecnologia disponibile permette di concepire e costruire macchine efficientissime e molto più semplici dal punto di vista meccanico di un tempo, poiché l’evoluzione tecnologica copre distanze sempre più lunghe, arrivando in luoghi spesso un tempo inaccessibili con soluzioni impensabili solo qualche anno prima.
L'ultimo
sviluppo del DDVL ha riguardato una rivisitazione di
alcuni elementi della cellula e l'adozione di due unità MPU per
aumentarne la potenza dispobibile, oltre ad una nuova progettazione dei
due rotori. Il DDVL infatti è stato esclusivamente
concepito come eletro-coptero adatto al lavoro aereo e non al trasporto
passeggeri.
 |