Classificazione degli aeromobili
In questa sezione: Classificazione degli aeromobili; Autogiro; Girodine; Elicottero, Convertiplanio; Elicoplano; Multirotori
Nel
settore industriale o in qualunque ambiente tecnologico negli anni si
sono sviluppati termini e linguaggi molto particolari; se vogliamo perfino
troppo settoriali. Questo dato però non deve affatto spaventare
lo studente pilota, che invece avrà la possibilità di acquisire
la conoscenza di quei termini tecnici cosi come il loro significato lungo
il percorso teorio e sopratutto durante le attività di volo. Questo
nuovo "dizionario" ti darà la possibilità
di interagire con altri specialisti di questa materia con assoluta sicurezza
e proprietà di linguaggio, ma sopratutto di comprendere al meglio
gli elementi ed il significato che ogni termine contiente che fanno parte
di questo mondo tecnologico.
Prima di iniziare il nostro percorso sarà necessario chiarire attraverso
lo schema riportato di sotto le caratteristiche e le varie tipologie di
aeromobili cosi suddivise.

Dallo
schema riportato si può notare chiaramente come gli AEROMOBILI
- che definiscono tutte le macchine volanti - differiscano tra
loro per funzione - cosi come nelle loro parti costruttive -
e quindi nell’impiego per le quali sono state progettate. Esse si
dividono in due rami principali; rispettivamente le AERODINE
e gli AEROSTATI.
Le prime rappresentano la categoria che a noi più interessa in
questo trattato. Questa sezione infatti riguarda tutte le macchine più
pesanti dell’aria - solitamente dotate di sitemi di propulsione
a motore -contrariamente al secondo gruppo che invece si riferisce
alle macchine più leggere dell’aria.
Entrambi gli insiemi di aeromobili si suddividono a loro volta in altre due categorie; quelle non dotate di alcun propulsore, e quelle invece dotate di uno o più propulsori.
Nella
sezione AEROSTATI ad esempio ci sono i dirigibili che
sono macchine aerostatiche dotate di propulsore proprio che assicurano
il movimento dell’aeromobile attraverso lo spazio, con completa
indipendenza (nei limiti operativi) da correnti aeree o venti.
Le MONGOLFIERE invece, sono dipendenti dai venti e dalle
correnti aeree che provvedono al loro spostamento nello spazio, in maniera
casuale non essendo provviste di alcun propulsore.
Anche
le AERODINE sono divise in due diverse categorie cosi
come gli Aerostati, cioè dotate di motore proprio
che ne assicura il volo e la sostentazione come avviene con gli Aerei
o gli Elicotteri.
Gli ALIANTI invece appartengono a quelle macchine non
dotate di propulsore, tuttavia più pesanti dell’aria ma capaci
di mantenere il sostentamento ed il volo, sfruttando i venti e le correnti
ascensionali, prodotti dalle differenze di temperatura tra le superfici
sorvolate ed essere capaci di mantenere una precisa direzione. Tra esse
oltre agli alianti vi è anche il Parapendio, il
Deltaplano e perfino la vela per il Kite-surf.
Tra l'altro questi ultimi anche se per brevi distanze generano portanza
grazie al vento ed alle correnti ascenzionali proprio come gli Aquiloni.
Sia le AERODINE che gli ALIANTI necessitano
di ampie superfici aerodinamiche che ne assicurano la portanza in volo
- diversamente dagli AEROSTATI - che invece
utilizzano le proprietà tipiche di alcuni gas leggeri, come l’aria
riscaldata ad esempio, che in natura ha la tendenza a salire verso l’alto
producendo - se contenuta in un involucro – l’ascensione
verso l'alto dell’involucro e del suo carico. L’invenzione
di questa macchina è attribuita ai fratelli Mongolfier
che furono storicamente i primi a staccarsi dal suolo con un macchina
costruita dall’uomo; questa tipologia è anche conosciuta
con il termine di macchina più leggera dell'aria.
Aeromobili ad ala rotante
Il soggetto principale su cui è fondata questa sezione è senza dubbio l’Elicottero, tuttavia durante il corso della stesura di questa parte del sito ho ritenuto necessario dedicare una ampia sezione al funzionamento del padre di questa macchina: l’Autogiro.
Autogiro
L’Autogiro
vola in maniera differente o se vogliamo opposta rispetto all'elicottero,
ma con esso condivide il novanta percento degli elementi che costituiscono
il rotore. Fu inventato dal Conte LA CIERVA agli albori
del secolo scorso, ed essa ha segnato il primo passo per lo sviluppo di
numerosi componenti, che in seguito sono stati impiegati su macchine più
evolute come l’Elicottero.
L’Autogiro funziona in maniera piuttosto semplice.
E’ dotato di un rotore principale portante, che si comporta come
una superficie aerodinamica, in altre parole una sorta di ala circolare.
Durante la rotazione le pale descrivono un disco virtuale che si comporta
come un ala, il rotore principale tuttavia a differenza dell’elicottero
- che invece è collegato per mezzo di trasmissione ad uno o
più motori - in un autogiro ruota liberamente senza alcun
ausilio meccanico.
La rivoluzione delle pale avviene attraverso una serie di fenomeni aerodinamici
e fisici - che analizzeremo più in avanti - grazie alla
spinta attraverso l'aria generata da un’elica che mantiene l’intero
aeromobile in moto traslato vettoriale, ad una velocità relativa.
Il rotore di un Autogiro verrà collegato al motore principale solo
per l’avviamento iniziale della rotazione delle pale pre decollo,
attraverso l'ausilio di una speciale frizione, presente nella maggior
parte delle macchine più moderne, questa procedura infatti risulta
utile affinché la macchina possa decollare in un ridottissimo spazio
di decollo.

L’Autogiro tuttavia pur potendo decollare in uno spazio ridotto, non è in grado di mantenere il volo stazionario o a punto fisso (Hovering), come invece è capace di fare un elicottero.
Alcuni autogiro se sottoposti a particolari condizioni di volo con vento frontale costante, grazie anche alle capacità del pilota, possono mantenere per qualche minuto una condizione di volo stazionario, finché la velocità del vento relativo equivale alla velocità minima di sostentamento dell'autogiro stesso rispetto al vento relativo.
Tra
agli anni 30 e 40 gli autogiro furono
largamente utilizzati per vari scopi, tra i molti vi fu l’impiego
del trasporto postale, la ricognizione ed il collegamento. Questa macchina
tuttavia scomparve in fretta dal mondo commerciale poco dopo l’avvento
dell’elicottero, che invece si dimostrò capace di prestazioni
e caratteristiche molto più elevate e vantaggiose.
(Kellet
Autogyro Video).
Oggi l’Autogiro è soprattutto impiegato
nel volo sportivo privato con piccoli esemplari monoposto ed in alcuni
casi biposto. Vi è stato qualche caso industriale di sviluppo
di un modello per il trasporto commerciale, come l'AIR Hawk4
Gyroplane ampiamente sviluppato, ma non sembra - purtroppo
- si sia ancora ridefinito un vero inserimento di queste macchine nel
settore commerciale. Le tecnologie dei materiali ed alcune applicazioni
nell'ambito civile potrebbero riaprire questa nicchia di mercato, attraverso
una interessante rielaborazione di autogiro più complessi e promettenti,
perfino dal punto di vista del trasporto privato. In tale proposito
qualche anno fa ho fatto uno studio per elaborare dei progetti di autogiro
per applicazioni commerciali, ma fin'ora essi non hanno destato alcun
interesse industriale, tranne lo spunto prodotto da un solo mio progetto
che sembra sia stato perfettamente clonato da un produttore europeo
mio malgrado.
JAUN DELLA CIERVA CORDONIU’ inventore di questa macchina, spianò la via ai contemporanei elicotteri mettendo a punto delle soluzioni tecniche irripetibili come il rotore articolato, il comando Ciclico; il comando Collettivo; le cerniere di flappeggio e brandeggio, e quindi lo sviluppo dei rotori articolati, tutti meccanismi principali di funzionamento di un tipico rotore di un elicottero o perfino di macchine più complesse come gli odierni Convertiplani.
Girodine
Torneremo
ancora a parlare dell’autogiro alla cui famiglia appartengono
anche le GYRODINE. Queste macchine non ebbero grande
sviluppo anche perché apparvero in contemporanea con gli elicotteri.
Furono impiegate per un breve periodo e si differenziavano dagli Autogiro
per il fatto che esse erano dotate di due propulsori separati, uno che
assicurava la propulsione orizzontale, attraverso una o più eliche
spingenti, e l’altro che invece provvedeva alla rotazione del
rotore principale, spesso attraverso l'azione di aria compressa per
eliminare il gravoso problema della coppia, che come vedremo rappresenta
uno dei problemi principali per la progettazione di un elicottero.
Un eccezione fu la macchina conosciuta come Rotodyne
della inglese FAIREY. Si trattava di un velivolo ricavato
da una fusoliera aeronautica, provvista di due motori turbo-elica che
azionavano delle eliche a passo variabile, addette alla propulsione,
ed un rotore principale alimentato da aria compressa proveniente dai
gas di scarico dei due turboelica che venivano espulsi per mezzo di
ugelli montati alle estremità delle pale stesse, in modo da annullare
l'effetto della coppia. Il rotore principale provvedeva sia al sostentamento
attivo in decollo ed atterraggio verticali, sia al volo stazionario
o hovering, cosi come al volo traslato. Durante il volo orizzontale
la macchina si comportava proprio come un Autogiro, sfruttando le proprietà
dell’AUTOROTAZIONE di un rotore libero.

Il
ROTODYNE era capace di straordinarie prestazioni e
fu impiegato perfino per il sollevamento ed il posizionamento di precisione
di carichi piuttosto ingombranti, come piccoli ponti ed altre strutture
aero-trasportabili, a mezzo di gancio baricentrico.
ROTODYNE(video)
Purtroppo i costi di gestione e le nuove politiche
economico-industriali di quegli anni resero l’impiego della macchina
da promettente a sconveniente, e già dai primi anni 60
il Rotodyne scomparve dal mercato che invece guardava
con particolare attenzione ai nuovi grandi elicotteri.
Oggi Sikorsky sta sperimentando con successo una formula meccanico-aerodinamica che si avvicina molto al concetto di Girodina, con il progetto dell'X2 e del Sikorsky S96. Questi due aeromobili oltre a volare in modalità elicottero per il volo verticale o quello a bassa e media velocità, sono in grado di volare ad alta velocità in modalità autogiro. Essi sono infatti dotati di un'elica in coda che fornisce una spinta importante alla macchina che utilizza i due rotori assiali controrotanti (molto singolari) in constante autorotazione. Infatti a basse velocità una trasmissione molto complessa, gestita da un dispositivo digitale, riaggancia progressivamente i rotori al sistema di trasmissione delle due turbine, riportando l'aeromobile in modalità elicottero. In realtà il meccanismo è molto più complesso e sarà mia cura dedicare un capitolo a questo tipo di aeromobile non appena saranno terminati i test di sviluppo di queste macchine davvero interessanti.
L'Elicottero
Abbiamo visto come la storia dell’Elicottero sia stata costruita sull’esperienza di molteplici concetti cosi diversificati tra loro, sia meccanici che aerodinamici. Numerose sono state le idee che alla fine hanno portato principalmente ad un insieme di forme che caratterizzano una macchina capace di librarsi in aria; a distanza variabile dal suolo; in qualsiasi condizione, con un controllo da parte del pilota facilmente sostenibile e non eccessivamente complessa. Sebbene come vedremo in avanti il pilotaggio di questo aeromobile richieda una particolare predisposizione naturale, per un impegno psico-fisico iniziale piuttosto importante.

Io stesso ho ritenuto importante utilizzare tutte le possibili tipologie attraverso la costruzione di modelli virtuali, che verranno utilizzati lungo tutte le esposizioni teoriche, proprio a sottolineare il principio comune tutto sommato identico delle varie soluzioni architettoniche, sebbene la formula finale e più comune sia rappresentata dalla combinazione di un rotore principale ed uno anticoppia posizionato in coda, che tuttavia non sarà l'unico nostro riferimento tecnico.
Il Convertiplano
E’
questa una storia lunga ed incredibile, piena di tentativi falliti ed
altri brillanti e di successo. La storia del Convertiplano
risale al dopoguerra, quando attraverso alcuni progetti molto originali
- tra i più importanti il NASA VZ-2 -
che videro già Bell e Candair
ed altre aziende del settore - nel continuo tentativo di costruire qualcosa
che somigliasse più ad un aereo che ad un elicottero ma che fosse
in grado sia di atterrare che decollare verticalmente su una superficie
contenuta, così alla fine si riuscì ad arrivare ad un prototipo
che mostrò le sue potenzialità per un impiego sopratutto
militare.
Non andrò oltre a dilungarmi nei dettagli del lungo percorso storico
di questo velivolo, anche perché saranno le esposizioni dei vari
argomenti nel tempo, a portare a citazioni tecniche relative a questa
o piuttosto a quella soluzione tecnica. Andremo invece a definirne le
caratteristiche più importanti e con esse l’idea di base
che vuole per l’appunto risolvere una serie di problemi importanti
legati a questi aeromobili.
Il punto saliente di questo progetto è caratterizzato dalla possibilità
di poter sfruttare sia le capacità di decollo ed atterraggio verticale
dell’elicottero, sia di poter raggiungere velocità di traslazione
elevate; quest'ultima caratteristica purtroppo al momento non rientra
del tutto nelle potenzialità delle macchine ad ala rotante convenzionali,
problematica invece superata brillantemente proprio dai Covertiplani.

Il
Convertiplano è dotato di due principali rotori
in tandem ma sistemati lungo l’asse
trasversale sulle rispettive estremità alari. I rotori sono basculanti
e possono ruotare per un totale di poco più di 90°,
potendo cosi portare la macchina ad un doppio comportamento e cioè
in modalità volo verticale, tipico di un elicottero - con
tutte le identiche relative problematiche che analizzeremo
in seguito - ed in modalità in volo rettilineo orizzontale
come un aeroplano, una volta inclinati entrambi i rotori in avanti.
Quello che a noi più interessa tuttavia è il comportamento
che la macchina assume durante il volo in modalità elicottero.
Entrambi i rotori sono per alcuni aspetti simili a quelli di un elicottero,
essi girano rispettivamente in senso contrario per compensare la coppia
e sono dotati di articolazione di tipo semirigido, che ricordano per
alcuni versi un rotore basculante di tipo Bell ma a
tre pale, piuttosto che di un rotore articolato vero e proprio. (Vedi
sezione rotori).
I convertiplani sono dotati sia di comando ciclico
che di comando collettivo. Tuttavia la novità
tecnologica in questa macchina di rilevante importanza è rappresentata
dalla presenza del comando aggiuntivo di traslazione che permette il
passaggio da una a l'altra modalità di volo.
La messa a punto di questo dispositivo ha richiesto numerosi anni di
sperimentazione ed un larghissimo uso di sistemi elettronici di controllo
e gestione della stabilità, sia statica che dinamica di altissima
complessità tecnologica che purtroppo penalizza fortemente i
tempi ed i costi di manutenzione.
Uno dei problemi più difficili da risolvere infatti, è
stato costituito dal fenomeno di precessione giroscopica che produce
delle forze torcenti sull'asse di rotazione dei rotori sopratutto in
fase di transazione tra le due modalità di volo. Tra l'altro
come vedremo in avanti, gli elicotteri sono sottoposti a precise procedure
di peso e bilanciamento necessarie a mantenere la macchina stabile durante
il volo, che anche in un convertiplano risultano piuttosto importanti.
Il Convertiplano è costantemente soggetto a
variazioni del suo baricentro che si muove continuamente in una serie
di posizioni lungo il suo asse longitudinale attraverso il tronco della
fusoliera, in modo particolare proprio durante la fase di transizione
dalla modalità elicottero a quella aeroplano.
A questo va aggiunta la forte componente giroscopica che tende a mantenere
i rotori sempre paralleli al piano orizzontale terreste, mettendo in
seria difficoltà la stabilità del sistema, oltre a provocare
forti momenti torcenti sulla trasmissione e sulle ali.
Affinché si riesca a mantenere un assetto stabile e costante
durante la fase di rotazione delle gondole (rotori), viene richiesto
un lavoro complesso e macchinoso che è possibile risolvere solo
grazie ad una elettronica piuttosto elaborata. Inoltre i sistemi di
smorzamento delle vibrazioni causate da entrambe le trasmissioni collegate
lungo l’asse laterale - che attraversa l’ala da una
all’altra estremità - ne aumentano la complessità
costruttiva e quindi i costi di manutenzione.
I vantaggi comunque sembrano essere apparentemente considerevoli se
non altro in alcuni impieghi strategici come quelli militari, anche
se i costi elevati possono essere sostenuti solo da budget tutt'altro
che sostenibili da imprese private, che forse troverebbero questa macchina
sconveniente per gli alti costi di gestione. Tuttavia la
Bristow
sta utilizzando un AW609(video)
in un programma di sperimentazione civile, ma la macchina da loro utilizzata
è certificata come velivolo sperimentale, quindi con ristrette
possibilità operative. Purtroppo in seguito ad un incidente grave
il programma è stato sospeso.
La Agusta in una joint-venture con la Bell
che successivamente si è spostata con un accordo con la Westland,
ha sviluppato una propria versione, il modello AW 609
per applicazioni civili e corporate, per quanto questa macchina sia
complessa ed efficiente non è tuttavia in grado di assolvere
almeno al momento ad alcuni compiti di soccorso, come invece solo l’elicottero
è in grado di fare, con precisione e flessibilità uniche
dell’ala rotante. Tuttavia il futuro non è facilmente prevedibile,
ed io stesso lavoro per cercare di disegnare nuove traiettorie con nuovi
progetti di velivoli VTOL alternativi.
Il primo tentativo di sviluppare un aeromobile che potesse volare sia in modalità ad ala fissa che ad ala rotante avvenne nel 1937 da parte di Herrick con il suo Convertoplane con l’aiuto di McClarren del Philadelphia's Franklin Institute. La macchina poteva alzarsi in volo sfruttando la portanza generata dall’ala superiore che era sospesa su un cuscinetto che le permetteva di ruotare, oppure rimanere fissa e comportasi come un biplano convenzionale. Dalle informazioni storiche ricavate da questo progetto sembrerebbe che la fase di transizione non fosse possibile in volo, perché nessun sistema di allineamento di precisione dell’ala rotante fu mai messo a punto per questo dispositivo.

Agli inizi degli anni settanta ancora una volta la Sikorsky Industries sempre innovativa nella ricerca, costruisce il Sikorsky S-72 RSRA, un elicottero ibrido, dotato di una coppia di ali portanti; di un rotore anticoppia; e di un rotore principale molto particolare, perché capace di bloccarsi in volo e funzionare come una sorta di ala. La macchina era anche dotata di una coppia di turbo fan rispettivamente posizionati ai lati della fusoliera e sospesi su dei sostegni a V. Il programma si dimostrò troppo costoso e fu purtroppo interrotto nel 1984, dopo alcuni anni di interessante ed intensa sperimentazione.
Multirotori
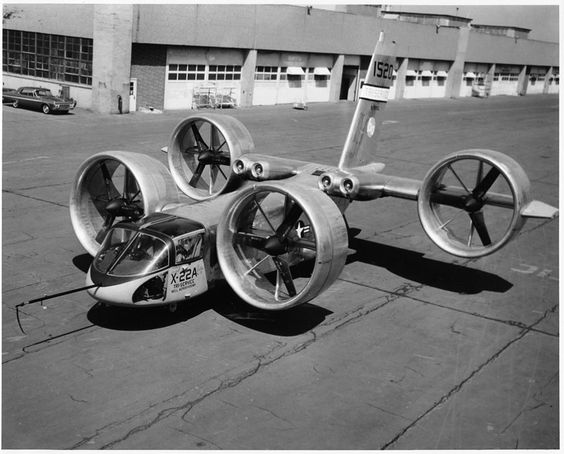
Sebbene sembri nuova questa tipologia di velivoli, essa in realtà si è affacciata sulla scena aeronautica molto prima delle macchine monorotore o birotore apparendo sin dall'inizio della storia degli aeromobili a rotore. Tuttavia dopo il conflitto mondiale ci sono stati moltissimi tentativi per costruire macchine del genere che in qualche caso come l'X22 della Bell hanno coperto circa un ventennio di sperimentazione.
Personalmente sono sicuro che in una qualche forma i multirotori faranno parte dello scenario futuro del mondo aeronautico. Io stesso mi occupo di progettazione di multirotori per trasporto ed impiego civile, ed oggi è possibile produrre delle macchine che rasentano la perfezione, grazie allo sviluppo della propulsione elettrica, ma questo è altro argomento ed esula da quello che tratteremo al momento lungo il corso di questa esposizione. Puoi tuttavia cliccare sulla sezione appositamente dedicata ai Multirotori per saperne di più. Pegasus (Video)
I multirotori sono macchine molto interessanti per alcuni aspetti tecnico-costruttivi. Sono semplici se dotate di rotori elettrici, richiedono poca manutenzione e volano molto bene grazie ad un sistema di controllo di stabilità statica e dinamica, perchè diversamente dagli elicotteri i multirotori sono molto instabili in natura e senza l'ausilio di un sistema che ne mantengano il controllo continuo dell'assetto risulterebbero assolutamente incontrollabili, poichè generano quattro differenti momenti, quattro coppie e quattro sistemi di turbolenze, e dunque il continuo sbilanciamento di questi fattori fa in modo che questo tipo di aeromobili necessitino di stabilizzatori dinamici elettronici ed unità logiche, oggi molto piccole ed efficienti.
Piccoli multirotori sono apparsi alcuni anni fa, intorno al 2009 e si sono diffusi molto in fretta. Il mio primo multirotore l'ho acquistato nel Marzo del 2010 assemblando la macchina su di un telaio in carbonio allora molto costoso, e ricordo che nessuno conosceva questo tipo di "aeromodello" in Italia, giacchè me ne ero procurato i componenti all'estero. Da allora ho costruito ben nove diversi tipi di multirotori in vari materiali e combinazioni. Nel mio caso però lo scopo è sempre stato diverso poichè l'utilità di questi mezzi aerei cosi perfetti mi è sempre stata utile per fare sperimentazione e ricerca, in modo particolare per trovare conferma sui modelli progettuali concepiti dai miei studi sin dal 1996.
Oggi sono molto diffusi a tal punto che quasi tutti gli enti di amministrazione aeronautica hanno cominciato a prendere provvedimenti per cercare di sviluppare una regolamentazione come in Italia. Non ci occuperemo di regolamentazioni in questo e negli altri capitoli, ma solo del funzionamento di questa macchina interessante in una sezione dedicata. Nella foto sotto il mio Pegasus costruito nel 2012 che è stato uno dei miei multicopteri utilizzato per ricerca e sviluppo di macchine più complesse, come i Verticopteri EJ ed i CellCraft che fanno parte del portafoglio di alcuni dei miei più importanti progetti del genere sviluppati sin dal 1996.
Ho comunque ritenuto importante inziare ad aprire una sotto-sezione (Multirotori) dedicata a questi velivoli ed alla loro aerodinamica proprio per coprire molte lacune che ancora oggi sono purtroppo linguaggio troppo comune di chi si affaccia a questo tipo di volo a controllo remoto, oltremodo alimentato da moltissima disinformazione. Il secondo motivo è comunque relativo a spiegare in maniera semplice ed efficace il modello aerodinamico di alcuni dei miei progetti più importanti di velivoli ad elettrorotori più antichi come il CellCraft o quello di macchine di recente progettazione come i Verticraft, in entrambi i casi disponibili su questo sito nelle apposite sezioni e questo perchè ritengo che in futuro il programma di studio per le licenze di volo includano anche l'aerodinamica di questo tipo di aeromobili.

Il primo multirotore apparso nella storia che si registra è il modello di Cossus 1845, costituito da una specie di baldacchino con sopra montati tre piccole elichette. Sembra che non riusci mai a volare, tuttavia i tentativi furono numerosi ed inistenti, si va dal giroplano di Breguet - un vero e proprio quadcoptero - fino al Curtis X19 del 1964, un quadrirotore con una fusoliera di un aeroplano. Molti sono ancora gli esempi che si possono fare, e probabilmente in futuro si portrà assistere alla realizzazione di progetti come i miei CellCraft, o piuttosto qualche Verticraft o Verticoptero della serie EJ, descritti in questo sito.
©Gino D'Ignazio Gizio