Coppia
In questa sezione: :Rotore anticoppia, Rotori spingenti e rotori traenti, Direzione di rotazione del rotore anticoppia, Senso di rotazione dei rotori anticoppia, Flappeggio del rotore anticoppia, Effetti della forza correttrice, Altezza del rotore Anticoppia, Sistema anticoppia FENESTRON, Sistema N.O.T.A.R. Avaria del rotore anticoppia, Perdita della forza correttrice sul rotore anticoppia (LTE), Tail boom Strake.
La
storia dell’elicottero come abbiamo visto, è contornata di
difficoltà e di conflitti tra leggi della fisica meccanica e dei
fluidi, che rendono particolarmente affascinante questa macchina. La terza
legge della dinamica ancora una volta gioca un ruolo fondamentale non
solo per il principio del volo stesso dell’elicottero, ma anche
per la sua stabilità in volo.
Ad una azione corrisponde una reazione uguale e contraria.
Si tratta infatti di una meccanica di forze che si genera durante la rotazione
del rotore, che muovendosi in una determinata direzione circolare sull'asse
verticale, genera di conseguenza una reazione che porta la fusoliera a
ruotare nella direzione opposta ad esso. In altre parole la Coppia
che agisce sulla fusoliera è generata dalla risultante prodotta
dal lavoro/resistenza che si generano sul rotore principale
e che viene a scaricarsi sulla fusoliera con conseguenze letali, poichè
la macchina in questa condizione è praticamente incontrollabile,
perchè comincierebbe a ruotare su se stessa, come l'animazione
sotto evidenzia.
Per molti anni lungo la strada dello sviluppo di questa macchina si sono
messi a punto una serie di meccanismi e dispositivi progettati per equilibrare
questo inevitabile stato di cose della meccanica elicotteristica.

Molti furono i tentativi per risolvere questo problema, che limitava fortemente lo sviluppo dell’elicottero. Una delle idee più bizzarre fu quella di applicare dei piccoli ugelli alla estremità delle pale che generavano una spinta che metteva il rotore in moto, annullando pertanto l’effetto della coppia, poiché la forza non si generava sul fulcro di rotazione e cioè sull’albero - che avrebbe prodotto una spinta opposta sulla fusoliera - ma avveniva al di fuori di esso. Si trattava apparentemente di una soluzione interessante, ma oltre a limitare l’autonomia della macchina rendeva il tutto molto complesso. Le pale infatti erano cave ed attraversate da un condotto che spillava aria compressa o addirittura gas caldi del motore indebolendo con il tempo i materiali e la struttura nell’insieme.
Nelle versioni con motore a getto, il controllo dell'imbardata avveniva attraverso una specie di splitter, che deviava il getto verso destra o sinistra in coda all'elicottero. Nelle macchine con motore alternativo invece vi era montato un piccolo rotore, che attraverso una pedaliera poteva aumentare o addirittura invertire l'angolo di attacco delle pale per generare un vettore che spingeva la coda verso destra o piuttosto verso sinistra, in altre parole aumentando la spinta per opporsi alla coppia o diminuendola. Vi era inoltre un piccolo effetto di attrito che tendeva a trascinare leggermente la fusoliera nella stessa direzione di moto circolare del rotore. Tuttavia questo problema venne risolto con l’applicazione di uno stabilizzatore che sfruttava il flusso d’aria proveniente dal rotore per annullare questo fastidioso dazio meccanico da pagare in ogni caso. In altri casi il controllo dell'imbardata avveniva attraverso un piccolo rotore di coda che durante il volo traslato o stazionario manteneva un angolo di incidenza delle pale uguale a zero. L'angolo di attacco delle pale poteva essere aumentato in senso positivo o addirittura in senso negativo per ottenere la rotazione opposta, come nel Dragonfly (Video).
Una delle prime soluzioni meccaniche più interessanti fu caratterizzata dall’impiego di due rotori coassiali contro-rotanti che annullavano vicendevolmente l’effetto della coppia. Alcuni straordinari elicotteri - tra i miei preferiti - come il russo KA32 sono dotati di questo sistema. Più di recente il Sikorsky X2 adotta questo tipo di rotore, che oltre ad essere il più veloce elicottero del mondo, poichè è provvisto di sistema di controllo dinamico delle pale per ridurre l'effetto prodotto dalla dissimetria di portanza, in modo da superare il limite tecnico di velocità fin'ora raggiunto da un elicottero. Prima ancora l’S59, aveva aperto la strada a questa nuova tipologia di rotori coassali controrotanti, ma anche molteplici elicotteri radiocomandati sono costruiti con questo tipo di architettura. Analizzeremo tuttavia queste tipologie una ad una in dettaglo, evidenziando le caratteristiche più interessanti in un capito appositamente dedicato a questo tipo di rotori.




Rotore anticoppia
Il rotore anticoppia - anch’esso complesso nell’insieme - portò ad una soluzione alternativa del problema, oltretutto rendendo la macchina più compatta ed altrettanto efficiente; sebbene questa formula meccanica sembrerebbe essere applicabile con limitazioni su elicotteri con un peso medio fino a non oltre le dieci tonnellate. I Sovietici hanno addirittura - con il loro gigantesco Mil Mi 26 - superato questo limite di peso di più del doppio, ma si tratta di un elicottero molto costoso in termini di gestione e consumo di carburante, ed adatto solo a limitate applicazioni.
Solitamente
si predilige la formula a tandem per macchine di queste dimensioni.
In generale comunque si può dire che la formula classica sia
la più efficace e la più diffusa in quasi tutte le tipologie
ed impieghi, poiché uno dei vantaggi più convenienti è
il basso assorbimento di potenza richiesto dal rotore anticoppia, inoltre
è possibile ottenere una stabilità direzionale piuttosto
efficiente, oltre ad avere comunque un buon controllo dell’imbardata;
anche in hovering.
Numerose sono le varianti di questo sistema del controllo della coppia,
dal rotore anticoppa classico, diffusissimo in qualsi tutta la produzione
sia per applicazioni commerciali che militari, cosi come il sistema
francese Fenestron, che incorpora una sorta di ventola
intubata all'interno dello stabilizzatore verticale di coda, o il più
avanzato N.O.T.A.R. messo a punto dalla McDonnel
Douglas già alla fine degli anni settanta. Vedremo in
dettaglio come funziona questo dispositivo attraverso una analisi delle
tre tipologie.
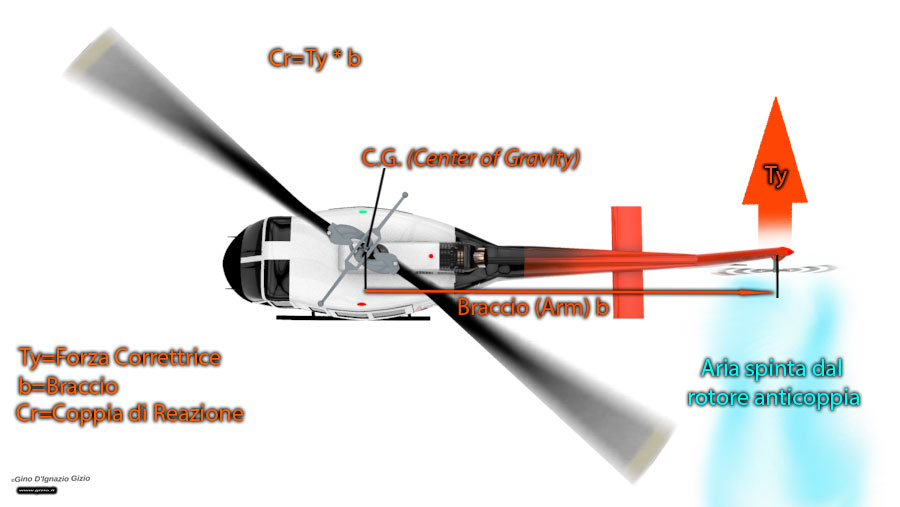
Il rotore di coda interviene producendo una spinta aerodinamica nella direzione opposta di rotazione della coda, detta Spinta Correttrice (Ty) in opposizione all'effetto della coppia, che si genera sul rotore principale e che si scarica sul resto della fusoliera, costringendola a girare nel senso opposto di rivoluzione del rotore. Il rotore di coda dunque produce una costante spinta nella direzione opposta affinchè la fusoliera mantenga un corretto assetto. Poichè a variazione di potenza corrisponde una variazione della coppia, il pilota dovrà intervenire correggendo la spinta generata dal rotore di coda per mantenere la fusoliera in posizione stabile e dritta, rispetto ad un punto di riferimento. L'azione di controllo e variazione della spinta del rotore di coda avviene attraverso la pedaliera, che modifica l'angolo di attacco del rotore di coda variando la spinta laterale.
C’è una dfferenza di comportamento tra le machine e della direzione di spinta dei rotori di coda, e questa è direttamente correlata alla direzione di rotazione del rotore principale. L'animazione sotto rappresenta il rotore di coda di un NH 300, con la direzione di rotazione del rotore principale in senso antiorario, che produce una spinta costante sulla fusoliera nella direzione opposta. Questa tendenza viene corretta dal rotore di coda che è orientato nella stessa direzione di moto della fusoliera per effetto della coppia, proprio per produrre una spinta equilibratrice ed opposta.

La
posizione del rotore anticoppia è fondamentale poiché
ad un braccio di leva maggiore si applicherà una forza minore,
e questo è lo stesso principio che descrive la leva di secondo
grado, come quella rappresentata dalla maniglia di una porta. Maggiore
sarà la distanza dal fulcro della leva minore sarà la
forza applicata su di essa.
E’ possibile rappresentare matematicamente questo problema. La
figura sopra mostra i tre elementi fondamentali per poter calcolare
con esattezza l’entità della forza correttrice
(Ty) che è situata ad una certa distanza
dal centro di gravità (CG), rappresentata
dal braccio di leva e cioè la distanza dal mast del rotore al
punto in cui la forza necessaria a bilanciare il sistema sarà
applicata (b).
Affinchè la coppia di reazione (Cr)
sia esattamente compensata si dovrà moltiplicare la forza correttrice
(Tr) per il braccio di leva (b).
Uno
dei problemi più frequenti durante la progettazione di un elicottero,
è dovuto alla considerazione di alcune caratteristiche che deve
possedere il rotore di coda. Un rotore con un diametro maggiore è
sicuramente vantaggioso sotto alcuni punti di vista, poiché produce
bassa rumorosità, ruota ad un basso numero di giri e richiede
una minore potenza.
D’altro canto un rotore di piccole dimensioni sebbene più
rumoroso, risulta più leggero e non costringe i costruttori a
ridimensionare il rotore principale poiché esso si troverebbe
troppo vicino al rotore anticoppia, inoltre la posizione del centro
di gravità e la distanza dal suolo sono ulteriori fattori convenienti
per questo tipo di scelta. Un rotore con diametro maggiore aumenterebbe
la consistenza di alcuni problemi aerodinamici, che in seguito come
analizzeremo nei dettagli creano una sorta di interazione sconveniente,
che si forma tra i due componenti.
La velocità periferica delle pale di un rotore anticoppia è molto elevata e questo fattore aumenta le rumorosità, inoltre la compressibilità aerodinamica è elevata rispetto ad un rotore con diametro maggiore. Tuttavia un rotore più piccolo è più leggero e contiene meno componenti. In generale si può stabilire che rotori anticoppia con un numero maggiore di pale richiedono un numero di giri inferiore dei rotori bipala che al contrario sono molto più rumorosi. Il rotore di coda di un MD500 è particolarmente silenzioso, si tratta di un sistema quadripala che gira ad una velocità media di 161 metri al secondo, mentre il rotore bipala di un Bell Jetranger raggiunge una velocità di 211 metri al secondo. Tuttavia la maggior parte dei rotori anticoppia gira a velocità comprese tra questi due valori.
La
superficie e la tipologia del profilo delle pale deve rispondere al
criterio fondamentale necessario a produrre una spinta notevole in modo
da contrastare la coppia risultante come sopra descritto, ma anche capace
di ruotare al di sotto della velocità di stallo sopratutto in
volo traslato. Solitamente il criterio di calcolo per stabilire le caratteristiche
della pala di un rotore anticoppia è lo stesso per quello relativo
al rotore principale, tuttavia si prediligono in genere pale con profilo
simmetrico per la maggiore efficienza aerodinamica.
Poichè le pale di un rotore anticoppia sono solitamente di tipo
rigido i problemi relativi alla complessità meccanica diminuiscono
notevolemente. Non è affatto necessario svergolare o rastremmare
la pianta di una pala e questo rende le cose più facili anche
dal punto di vista proggettuale.
Rotori spingenti e rotori trattori
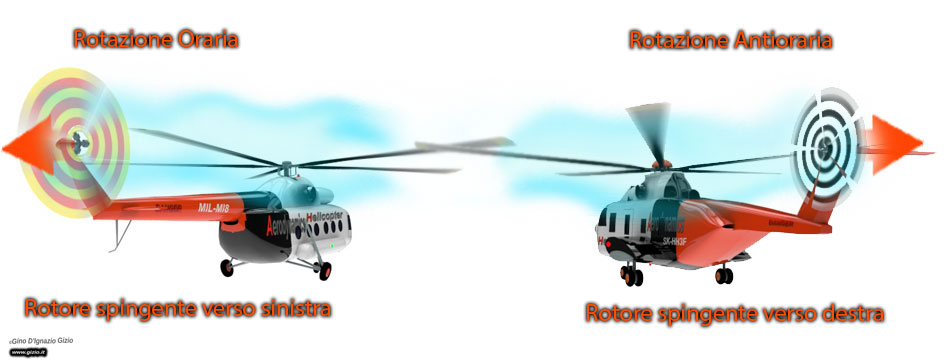
Anche tra i paesi che hanno sviluppato il proprio sistema rotore/rotore anticoppia si sono create delle varianti tecniche. Gli americani ad esempio hanno stabilito uno standard nel quale il rotore principale si muove in senso antiorario e quindi la coppia risultante sulla fusoliera porta la macchina a ruotare in senso orario e viceversa per gli elicotteri francesi e russi in cui i rotori hanno rivoluzione oraria. In questi elicotteri la maggior parte dei rotori anticoppia sono spingenti, cioè esercitano una forza che si muove in direzione frontale rispetto al rotore-anticoppia, e negli elicotteri con rivoluzione antioraria del rotore principale, essi sono posizionati sul lato sinistro. Ci sono tuttavia alcuni casi in cui i rotori anticoppia sono trattori, cioè succhiano aria dalla zona frontale spingendola nalla zona posteriore, ed in questo caso sono sempre sistemati sul lato destro, come avviene con l'AW139. Diversamente con gli elicotteri di fabbricazione russa e francese, in cui il rotore principale si muove in senso orario e quello anticoppia - essendo nella maggior parte delle volte spingente - si troverà sul lato destro, sebbene anche in questo caso ci sono eccezioni e riguardano i rari casi di rotori trattori che sono sistemati invece sul lato sinistro. In buona sostanza i rotori anticoppia sono per la magioranza delle volte sempre spingenti perchè il flusso aerodinamico non incontra superfici come gli stabilizzatori o altri elementi che si trovano nella zona del tronco di coda e dunque risultano più efficienti.
Gli
elicotteri sono dotati di stabilizzatori verticali,
essi vengono solitamente montati ad un certa distanza dal rotore di
coda, poiché questo deve spingere una quantità di aria
verso l’esterno (rotore spingente) succhiandola
dalla zona posteriore, dove lo stabilizzatore è posizionato.
La superficie dello stabilizzatore produce una notevole resistenza e
questo rende sconveniente l'impiego di un rotore trattore, cioè
che succhiasse la massa d'aria dalla zona frontale per spingerla alle
spalle verso lo stabilizzatore, che di per se è una superficie
piuttosto ampia e renderebbe il lavoro del rotore anticoppia piuttosto
inefficiente.
Solitamente i rotori di tipo trattore sono posizionati in cima allo
stabilizzatore verticale in modo da utilizzare un’ampia porzione
di spazio libero tale da rendere efficace la spinta che devono generare.
Il Sikorsky UH60 rappresenta questa eccezione poichè il rotore-anticoppia è di tipo trattore, esso è sistemato in testa allo stabilizzatore ed ha una inclinazione di alcuni gradi sul piano verticale, per migliorare le caratteristiche aerodinamiche ma anche l'effetto di rotazione sull'asse longitudinale che esso esercita sulla fusoliera. Il Bell 214 è anche esso dotato di rotore trattore sistemato in cima allo stabilizzatore verticale come anche sul AW139. Questo tipo di macchine sono tuttavia meccanicamente complesse nella struttura della trasmissione, poiché l’albero che descrive il braccio (b) deve incontrare due snodi, uno con inclinazione intorno ai 30° situato alla base dello stabilizzatore e che collega poi un secondo albero che corre all’interno dello stabilizzatore, fino ad incontrare un secondo snodo che collega il rotore anticoppia a 90°. Sia il cono di coda che lo stabilizzatore verticale contengono al loro interno anche tutti i meccanismi ed i sistemi di variazione del passo e le leve per il controllo del rotore anticoppia, insomma un bel po di lavoro per i meccanici a terra.
Senso di rotazione del rotore anticoppia
La direzione di rotazione del rotore è anch’essa stata oggetto di sperimentazione e spesso ha costretto i costruttori a rivedere l’idea originale dei vari progetti, allo scopo di incrementare sempre più le prestazioni di questo dispositivo. Uno dei primi casi riguarda la messa a punto e la successiva sperimentazione dell’elicottero d’attacco Lockeed Cheyenne, che costrinse gli ingegneri ad effettuare una modifica radicale sul rotore anticoppia invertendone il senso di rotazione, che aveva inizialmente una rivoluzione che si svolgeva in senso antiorario e che poneva problemi di manovrabilità per il pilota in condizioni di volo laterale verso sinistra. La scelta iniziale del progetto infatti limitava notevolmente la manovrabilità, a tal punto che egli arrivava a fondo del pedale sinistro già ad una velocità tra i 14 ed i 18 nodi, evidenziando una limitazione della macchina piuttosto inconveniente per lo scopo per il quale era inizialmente destinata.


E importante precisare che questo fenomeno viene generato in quelle configurazioni di rotori anticoppia che si trovano al di sotto del flusso del rotore principale, poichè esso ne condiziona l'efficienza che varia a seconda delle situazioni, che come vedremo attraverso il percorso di questo argomento, ne modifica la struttura e l'evoluzione con altri sistemi alternativi di controllo della coppia.
Un altro problema viene generato durante la traslazione, quando l'elicottero è in volo orizontale perchè il rotore anticoppia inzia a flappeggiare anch'esso e poichè il flusso d'aria che lo investe devia quello che esso produce, l'angolo di attacco del rotore anticoppia aumenta e produce una leggera rotazione della coda verso destra (muso verso sinistra) (o vicersa per rotori a rivoluzione oraria) e questo costringe il pilota ad usare il pedale destro per poter mantenere la direzione (o sinistro per rotazioni orarie). Il rotore anticoppia è sottoposto all'aumento della velocità periferica sulla pala avanzante esattamente come avviene sul rotore principale e questo richiede un sistema di smorzamento o controllo del flappeggio che nel rotore anticoppia è chiamato cerniera a Delta (Delta hinge).
Flappeggio del rotore anticoppia
Il
fenomeno del flappeggio è meccanicamente influente sul rotore
anticoppia, poiché in volo traslato è anch’esso
investito da un vento relativo che produce il fenomeno della dissimetria
di portanza, descritta
però su un piano verticale piuttosto che orizzontale, come avviene
sul rotore principale. Durante il processo di progettazione, quando
si decide l’esatta collocazione del rotore anticoppia, si stabilisce
il sistema di flappeggio che il dispositivo adotterà. Il dispositivo
più diffuso rimane la cerniera Delta (Delta hinge).
Nei rotori anticoppia bipala ad esempio la cerniera Delta permette l’oscillazione
del rotore che si adatta alle variazioni di velocità di traslazione
che influenzeranno l’angolo di attacco della pala avanzante rispetto
a quella retrocedente.
Un altro sistema molto comune è quello di impiegare due rotori
di questo tipo sovrapposti ad una certa distanza tra loro con un angolo
di 90 gradi, come quello impiegato sullo Hughes
MD500, oppure disposto con un angolo di circa 45°
come quello dell’AH 64 Apache; rotore conosciuto
anche come a croce di Sant’Andrea.
La caratteristica interessante del sistema a Delta è quella che combina entrambi i movimenti di flappeggio e di brandeggio allo stesso tempo grazie al fatto che l'asse di oscillazione è leggermente inclinato, come accade sul rotore del Robinson R22 che è di 17°.
Elicotteri
con dimensioni maggiori necessitano di un sistema anticoppia dotato di
cerniere di flappeggio indipendenti per ogni pala, poiché le dimensioni
del rotore sono maggiori e l’effetto di dissimetria di portanza
risulta ancora più evidente. Ci sono due varianti di questo sistema
di flappeggio, tuttavia entrambe funzionano sullo stesso meccanismo di
base.
Il primo è il rotore a Delta negativo, costituito
da un piatto composto da cerniere aventi un angolo di circa 30°
rispetto all’asse della cerniera di flappeggio, essa si adatta automaticamente
alle variazioni di dissimetria di portanza, variando pertanto l’angolo
di incidenza indipendentemente rispetto alle altre ed a seconda della
posizione che la cerniera assume sul piano di rotazione. Questo è
il sistema più utilizzato in assoluto.
La seconda variante invece è composta da un piatto dello stesso
tipo ma con angolo zero rispetto all’asse di attacco della pala,
mentre la cerniera di variazione del passo è disposta con un angolo
di circa 30° rispetto al perno della cerniera di
flappeggio.
Per macchine di maggiori dimensioni provviste di rotori anticoppia, come l’Erickson Skycrane o il Sikorsky CH53 il rotore anticoppia è molto più complesso ed è dotato anche di cerniere di brandeggio, poiché le dimensioni di questo dispositivo risultano importanti e dunque sempre più influenzate dal fenomeno della dissimetria di portanza, che rispetto ai rotori anticoppia avviene su di un piano verticale. Infine, è bene citare anche soluzioni meno complesse ed adatte a modelli di piccole dimensioni come gli elicotteri radiocomandati, nei quali la cerniera di flappeggio del rotore anticoppia è semplicemente costituita dallo stesso perno di attacco delle pale, che viene tenuto leggermente allentato in modo da garantire libero movimento delle stesse durante la rotazione, che le tiene in tensione automaticamente grazie all’azione della forza centrifuga.
Effetti della forza correttrice
Finora
abbiamo visto come durante l’evoluzione dell’elicottero si
siano inventati una serie diversificata di sistemi per compensare lo squilibrio
causato dalla coppia (Cr), che si genera sul rotore principale
e che si scarica sulla fusoliera. La formula più nota e diffusa
come abbiamo visto fin'ora è quella con rotore principale ed un
rotore anticoppia che produce una spinta (Ty), che viene
chiamata forza correttrice e che permette di mantenere la fusoliera ben
allineata lungo l’asse longitudinale. Il rotore anticoppia però
produce a sua volta una ulteriore serie di problemi che in ogni caso sembrano
in buona parte risolti, come la posizione sul terminale del tronco di
coda ed il senso di rotazione. Tuttavia sussistono ancora alcune questioni
parzialmente risolte legate a questo sistema di compensazione della coppia,
poiché la spinta che esso produce destabilizza leggermente l’assetto
della macchina, generando uno spostamento laterale nella direzione opposta
a quella della forza correttrice.
Questo problema ha assillato per lungo tempo i primi sperimentatori come
Igor Sikorsky ed Arthur Young che trovarono
la soluzione ideale inclinando leggermente il rotore principale, con un
angolo (Fy) nella direzione opposta alla spinta correttrice
(Ty), in modo da compensare in buona parte il fenomeno
di scarrocciamento prodotto dal rotore anticoppia. In assensa di detta
correzzione dell’assetto del rotore principale, il pilota sarebbe
costretto a volare tutto il tempo inclinando il comando ciclico nella
direzione di compensazione contrapposta a quella prodotta dal rotore anticoppia.

Dunque
tutti gli elicotteri che adottano questo sistema di controllo della
coppia sono costruiti con il mast del rotore principale leggermente
inclinato della direzione opposta alla forza correttrice (Ty)
in modo da compensare la tendenza della macchina di scarrocciare proprio
a causa della forza correttrice.
Mentre durante il volo traslato l’elicottero si serve anche delle
superfici stabilizzatrici come alettori, che come vedremo compensano
a loro volta gli squilibri generati dalle varie forze in azione al fine
di mantenere un assetto accettabile. Diversamente in volo stazionario
sarà il pilota a compensare al variare della potenza, quindi
della coppia, l’azione correttrice sul rotore anticoppia per mezzo
della pedaliera ed al contempo dell’uso del comando ciclico sul
disco del rotore principale nella giusta misura ed in armonia tra loro.
Altezza del rotore Anticoppia
Il mast del rotore in alcuni elicotteri subisce una ulteriore modifica per compensare l'assetto picchiato tipico del volo traslato, quando l'elicottero mantiene sempre il muso verso il basso per effetto del rotore che viene inclinato in avanti lungo tutto il persorso. In alcune macchine il mast del rotore viene intenzionalmente inclinato in avanti già in fase di progettazione, come sul UH60 o sull AW139, in modo tale che durante il volo traslato la macchina possa mantenere un assetto più livellato, ed è questo il motivo per il quale in hovering questi elicotteri sono leggermente inclinati all'indietro, mantenendo cioè il muso alto sull'orizzonte. Abbiamo visto che per ovviare al fenomeno dello scarrocciamento prodotto dalla spinta del rotore anticoppia, sia necessario inclinare il mast del rotore nella direzione opposta a quella della forza correttrice, questo risolve il problema dello scarrocciamento ma produce una coppia, una leggera inclinazione o rollio della fusoliera che grazie a questo fenomeno porterà sempre a toccare il terreno con un pattino o un carrello prima dell'altro.
Il problema potrebbe apparire relativamente importante ma l'altezza del rotore anticoppia rispetto al piano di rotazione dell'elicottero ha una sua ragione di essere a seconda della funzione per la quale la macchina è stata progettata, come ad esempio per gli elicotteri disegnati per il soccorso aereo, dove si tiene conto dell'importanza delle operazioni a terra e del personale e quindi pensando ad un rotore alto; lontano il più possibile dal suolo e molto vicino al piano di rotazione del rotore principale.
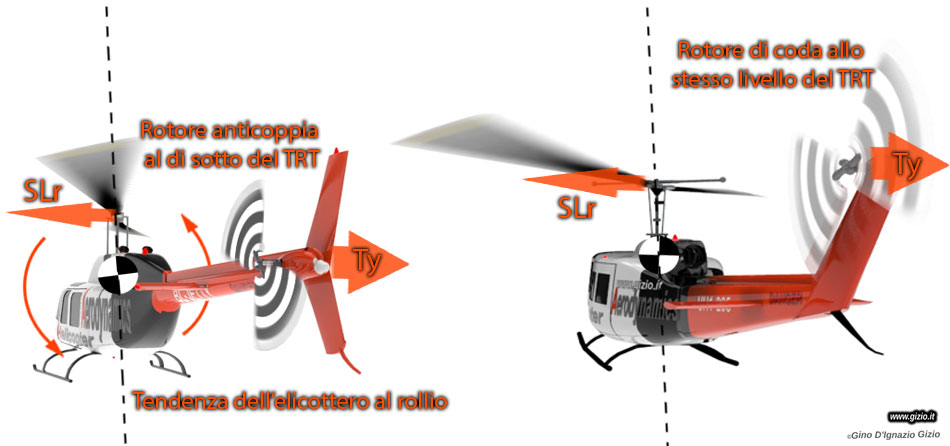
I rotori anticoppia possono essere posizionati a diverse altezze rispetto al piano di rotazione del rotore principale, o meglio rispetto al piano sul quale si genera la portanza (TRT). Nella maggior parte delle macchine i rotori sono sistemati al di sotto del rotore principale, questo riduce elementi meccanici perchè l'asse di trasmissione che si muove lungo il longherone di coda non subisce variazioni e va dritto alla scatola ad "L" che alimenta il rotore anticoppia, come avviene su macchine come il Robinson, Il JetRanger o l'Ecureil. Questa soluzione però produce una coppia di rollio che agisce intorno al Centro di Gravità della macchina che si trova al di sotto del piano del rotore principale, a circa un metro o più. La coppia si genera perchè mentre il rotore anticoppia produce la sua spinta correttrice (Ty), il mast del rotore principale viene inclinato nella direzione opposta producendo una spinta equilibratrice (SLr), e poichè entrambi non giacciono sullo stesso piano di azione producono una coppia costante che tiene l'elicottero leggermente più basso da un lato.
Su elicotteri dove il rotore anticoppia giace sullo stesso piano di rotazione del rotore principale, la coppia di rollio non si viene a creare e la macchina risulta sempre piuttosto livellata rispetto ad un piano immaginario, tuttavia questo comporta l'adozione di snodi e sezioni di alberi di trasmissione per portare il movimento meccanico al rotore anticoppia, che sorge sulla parte più alta del longherone di coda.
Sistema anticoppia FENESTRON
Sin dai primi anni dello sviluppo di questa formula, e cioè rotore principale e rotore anticoppia, sono stati sperimentati tantissimi sistemi alternativi di controllo della coppia, alcuni con successo, altri difficili nel controllo o con limitate possibilità di manovra, come il Bell ring fan, una specie di anello che circondava il rotore di coda di un Bell Jetranger. Uno dei più interessanti e compatti è senza dubbio il FENESTRON sviluppato dai francesi dell'allora AEROSPATIALE ed impiegato sin dall'inizio sul GAZELLE, primo elicottero commerciale che utilizzava questo dispositivo rivoluzionario, successivamente introdotto sul DAUPHINE, ed oggi sempre più diffuso su EC120, EC130 etc.
Il FENESTRON è composto da un rotore compatto, dotato di pale di piccole dimenzioni fissate su dei cuscinetti articolati ed integrate in una meccanica disposta a 90° molto ridotta. Il rotore è immerso in un anello situato al termine del tronco di coda. Il FENESTRON sfrutta le proprietà dei sistemi a rotore intubato che permette alle pale un rendimento sotto alcuni punti di vista perfino migliore di un sistema convenzionale, poichè le turbolenze ed i vortici marginali (resistenza indotta) che si formano alle estremità di esse vengono quasi completamente abbattute dall'anello che circonda il rotore. Inoltre alle estremità delle pale stesse si produce una significante pressione statica che si aggiunge alla forza generata dal rotore stesso.
Un altro vantaggio è chiaramente prodotto dalla compattezza del sistema e dal fatto che il Fenestron è meno influenzato dal flusso del rotore principale, che in un sistema convenzionale genera turbolenze sconvenienti e che qui invece vengono quasi del tutto eliminate. Tuttavia la resistenza che si genera sulla sezione di coda che sosteiene il Fenestron è più elevata di un rotore convenzionale, inoltre la potenza richiesta risulta in alcuni casi maggiore, e solo mentre in volo traslato non appena il gruppo stabilizzatore entra nel flusso la potenza sul rotore di coda viene ridotta.
Il carico sul rotore anticoppia è maggiore in hovering ed a basse quote ed è maggiore sopratutto in effetto suolo (HIGE) mentre in volo traslato assorbe meno potenza. Le pale di un rotore Fenestron sono rigide e sono solo montate su un sistema di articolazione di tipo collettivo allo stesso modo di quanto accade su un rotore convenzionale, per questo sono meno soggette a vibrazioni e nonostante le loro dimensioni ridotte subiscono un notevole carico sul disco, per questo un sitema servo-idraulico è necessario sui pedali per sostenere pressioni che arrivano fino a 66lb (30 kg).
Il sistema FENESTRON è in grado di produrre una spinta equivalente ad un rotore convenzionale pur essendo del 50% più piccolo. Infatti, mentre un rotore anticoppia convenzionale è fortemente influenzato dalla presenza dello stabilizzatore verticale che riduce in parte il flusso d'aria che esso utilizza per produrre la spinta correttrice, nel FENESTRON questo problema è completamente risolto, poichè il piccolo rotore è intubato è installato proprio all'interno dello stabilizzatore veriticale e dunque non soffre affatto di turbolenze causate da superfici resitive. Inoltre per le operazioni a terra è senza dubbio uno dei sistemi più sicuri. Il Fenestron non è adatto a macchine con peso superiore ai 12000lb (6000 kg).

Lo svantaggio del FENESTRON è che il dispositivo di articolazione è particolarmente costoso, oltre che complesso e richiede attenta e costante manutenzione, inoltre necessita una potenza operativa leggermente maggiore assorbita dalla trasmissione principale, infatti la potenza applicata al FENESTRON è inversamente proporzionale al diametro del rotore, e questo spiega chiaramente il perchè nelle ultime macchine che utilizzano questo sistema anticoppia, esso sia diventato considerevolmente più largo delle versioni precedenti, in cui il diametro minimo era intorno ai 89 cm fino ad arrivare a diametri soperiori ai 193 cm, con un guadagno in hovering superiore ai 130 kg.
Affinchè il rotore possa essere efficiente, la profondità dell'anello deve corrispondere all'incirca al 20% del diametro del rotore stesso, ciò però pregiudica la progettazione dell'insieme di questo dispositivo, che aumenta i problemi di aerodinamica e quindi di resistenza di forma che influenzano quell'elemento. Questo inoltre penalizza il percorso del flusso d'aria che attraversa il rotore e che subisce deviazioni e turbolenze specialmente in volo orizzontale. Questo problema constringe all'adozione di stabilizzatori verticali piuttosto ingombranti che migliorano la traiettoria in volo traslato, compensando l'azione del rotore anticoppia che in questa fase risulta meno efficiente di uno tradizionale. Anche in questo sistema il senso di rotazione ha un effetto importante e cosi come nei rotori convenzionali la direzione di rotazione avviene sempre in allontanamento dal flusso del rotore principale come già descritto per il rotore anticoppia di tipo convenzionale.
N.O.T.A.R. (No Tail Rotor System)
Il
sistema N.O.T.A.R. si riferisce all'acronimo inglese
di No Tail Rotor (senza rotore di coda) sperimentato
inizialmente dalla Hughes su di un prototipo di un
OH06 e sviluppato nella versione attuale dalla Mc Donnel
Douglas Helicopter Division, con tecnologia più avanzata
ed elaborata. Il sistema è composto da una piccola turbina intubata
capace di produrre un elevata pressione dinamica, che viene spillata attraverso
due splitter o slot posti lungo il condotto principale sul lato destro
sfruttando l'effetto Coanda, creando cioè un sottile
strato aerodinamico che produce una forte depressione che tende a succhiare
il tronco di coda verso destra. Il flusso genera una spinta allo stesso
modo come avviene per un profilo alare, e cioè per un effetto simile
al generarsi della portanza e cioè per depressione. Questo effetto
viene amplificato dal flusso del rotore principale che scorre lungo il
tubolare di coda mediante delle apposite fessure, aumentando per l'appunto
l'effetto Coanda.
All'interno del tubolare di coda viene generata una pressione dinamica,
mediante la turbina intubata alla base di esso. Alla fine del tubolare
di coda vi è una sorta di cilindro forato con dei deviatori interni,
capace di ruotare per un'ampiezza di circa 180° dal
quale fuoriesce in fine il flusso d'aria prodotto dalla turbina intubata.
Il cilindro mobile (Exit Mobile Nozzle) è
collegato alla pedaliera, che attraverso l'azione del pilota varia l'angolo
di attacco della turbina intubata ruotando contemporaneamente il deviatore
di coda che dirige il flusso d'aria nella direzione desiderata, producendo
una spinta (Ty) esattamente simile a quella
di un convenzionale rotore anticoppia, sul tronco di coda tale da far
imbardare l'elicottero in maniera controllata è stabile. In aggiunta
un dispositivo meccanico muove contemporaneamente i due stabilizzatori
verticali orientandoli in modo tale che in volo traslato essi possano
produrre una spinta laterale tale da contrastare la coppia.

In buona sostanza questo dispositivo descrive un idea che utilizza aria a bassa pressione ma ad alto volume, che si muove internamente al longerone di coda, prima che essa fuoriesca alla fine del percorso attraverso un diffusore, che essendo mobile può variare la portata del flusso e quindi la capacità di spinta (Ty). Lo slot o diffusore spilla il getto di aria proveniente dalla turbina interna ad una velocità di 250 ftp e ad una pressione di 2 psi. L'effetto Coanda avviene invece all'esterno di esso, attraverso il flusso che proviene sia dal rotore principale che da alcune piccole fessure lineari posizionate sul lato destro, dalle quali fuoriesce una parte del getto prodotto dalla turbina intubata. L'aria che si muove intorno al tubolare aderisce ad esso creando un effetto simile alla Portanza che produce una depressione in quella zona contribuendo a spingere il tubolare di coda verso destra. Tuttavia il diffusore rimane il principale responsabile della spinta (Ty) che è di 2/3 sul totale e solo 1/3 di essa dipende dall'effetto Coanda sopra descritto.

Il sistema N.O.T.A.R. assorbe una considerevole quantità di potenza che raggiunge all'incirca i 200 Hp per poter alimentare la turbina intubata e purtroppo ad una altitudine superiore ai 4000 ft la macchina sembra perdere circa 300 lb di capacità di carico utile, se paragonata ad un sistema convenzionale, tuttavia in volo traslato offre una minore resitenza perchè l'area in coda è piuttosto pulita e lineare dato che non è presente il rotore anticoppia, che solitamente produce una sensibile resistenza.
La
storia di questo sistema ha comunque una radice che va indietro di molti
anni fino al 1945 quanto un inglese che aveva acquistato
i diritti di brevetto dal primo inventore dell'autogiro Cierva,
costruì un prototipo di elicottero designato Aerotecnica
AC14 che utilizzava i gas di scarico del motore a turbina portandoli
in coda e deviandoli in modo da produrre una Forza Correttrice
(Ty) simile a quella di un rotore anticoppia convenzionale.
Il vantaggio di questo sistema sta nella elevata silenziosità operativa
di queste macchine, oltre che alla sicurezza a terra da parte di personale
operativo, come gli equipaggi del soccorso aereo, infatti viene ampiamente
utilizzato per il trasporto urbano e l'impiego nelle forze di polizia,
tuttavia è un dispositivo piuttosto costoso e complesso ed anche
in questo caso come il FENESTRON richiede un notevole
livello di manutenzione e messa a punto costante.
Avaria del rotore Anticoppia
La perdita del rotore di coda o di qualunque dei meccanismi sopra descrtitti necessari a produrre la Forza Correttrice significa perdere il totale controllo dell'aeromobile in volo, con conseguenze piuttosto serie. Il rotore di coda può subire un malfunzionamento in due modi principali, si può perdere il rotore per mancanza di alimentazione meccanica, con un arresto di questi, oppure si può registrare una mancanza assoluta di spinta, perchè risulta impossibile controllarne la quantità sulle pale; probabilmente per rottura dei meccanismi di cambio passo o del dispositivo idraulico-meccanico che trasmette il movimento dei pedali al rotore. In base alle procedure dei manuali di volo - come quello del Bell Jetranger - viene suggerito di chiudere la manetta per annullare la coppia e di atterrare cercando di disporsi contro vento, tenendo premuto a fondo il pedale destro (Rotore Antiorario) scendendo sostanzialmente in autorotazione. Nella realtà sono pochi i casi in cui la macchina non è stata distrutta o parzialmente danneggiata al contatto con il suolo, per il conseguente Dynamic Rollover che ne sussegue. In ogni caso quando ciò accade si spera di essere ad una quota di sicurezza tale da permettere la manovra di autorotazione, che consentirebbe un atterraggio piuttosto sicuro. (Video)
Perdita della Forza Correttrice sul rotore anticoppia (LTE)
In alcune circostanze si può perdere temporaneamente la spinta sul rotore anticoppia, ad esempio in missioni a bassa velocità con ventro traverso che costringe la macchina ad una improvvisa imbardata che non è possibile controllare con l'azione dei pedali (LTE Loss of Tail rotor Effectivenes). Questo fenomeno è conosciuto come Interruzione del Flusso sul Rotore di Coda (Tail Rotor Breackaway) o stallo del rotore. L'interruzione della capacità del rotore di produrre la spinta in maniera permanente (LTA Loss of Tail Rotor Authority) invece avviene quando nonostante si è giunti a fine corsa del pedale e non si riesce ad ottenere l'imbardata desiderata. La perdita di LTA è di natura meccanica, poichè alla base di questo malfunzionamento vi è un fattore di rottura di uno dei meccanismi che controllano l'angolo di attacco delle pale. Diversamente il fenomeno di LTE o temporanea perdita dell'effetto di imbardata è fattore prettamente aerodinamico, perchè viene prodotto dal vento e riguarda la parte periferica delle pale, in modo specifico la pala avanzante del rotore anticoppia.

Il fenomeno di LTE avviene su qualsiasi tipo di elicottero che operi con elevati ratei di potenza a bassa velocità e con vento traverso o vento in coda e con imbardate continue verso sinistra (Rotore Antiorario) laddove vi è una maggiore spesa di potenza per alimentare il rotore anticoppia. Oppure volando troppo vicini al limite di un approccio e sollevando ecessivamente il collettivo per potersi portare in breve in volo stazionario, senza correggere adeguatamente con il pedale, sopratutto se la velocità del vento è elevata e dunque maggiore potenza è richiesta sul rotore anticoppia. L'elicottero è ancora più sensibile ad una situazione di LTE quando il rotore è parzialmente coperto da uno stabilizzatore verticale e può essere molto evidente specie con vento laterale.
La spinta totale sul rotore dipende dal numero di giri al quadrato (Rpm²). In realtà la quantità di spinta sufficiente a mantenere l'elicottero dritto o meglio a fermare la rotazione prodotta dalla coppia generata dal rotore è suscettibile dal vento che si muove contro di esso, perchè la componente vento può aggiungere o sottrarre energia alla spinta generata dal rotore anticoppia.
A seconda della direzione di provenienza del vento si possono verificare condizioni diverse che possono più o meno causare una condizione di LTE. Un vento che avesse una velocità di 10 Kts potrebbe già di per se produrre un effetto significativo sul rotore di coda, mentre al di sopra dei 12 nodi l'effetto è minore, giacchè si sta generando la Portanza di Transizione (Transational lift), tuttavia come lo schema sotto riporta la direzione del vento influenza in modo differenziale il fenomeno di LTE sul disco rotore.
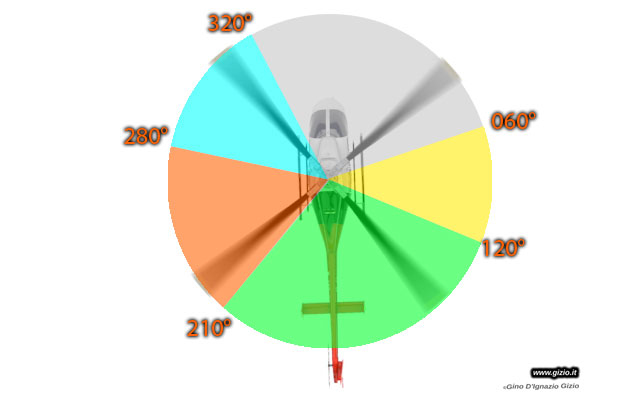
La grafica sopra descritta mostra le aree attraverso le quali il vento può produrre una condizione di LTE potenziale. Nell'area compresa tra i 120° ed i 240° il muso dell'elicottero è spinto verso il vento relativo attraverso l'azione aerodinamica della fusoliera e degli stabilizzatori verticali.
Nella zona compresa tra i 210° ed i 330° ad una velocità compresa tra i 5 ed i 10 kts si può verificare la possibilità di formazione di vortici anellari e quindi una condizione di LTE che rende complicato il controllo della macchina. Infine nell'area compresa tra i 285° ed i 315° in fase di virata verso destra, il rotore anticoppia può subire l'influenza dei vortici prodotti dal rotore principale.

Il generarsi di una condizione di LTE diviene un problema molto serio sopratutto in fase di virata o imbardata con vento laterale a sinistra (Rotore antiorario) o sul lato del rotore spingente a bassa velocità. Una delle condizioni in cui questa situazione diventa critica è quando c'è una riduzione della portanza di traslazione che conseguentemente richiede un maggiore dosaggio della potenza, con un relativo lavoro sul rotore anticoppia che in una condizione di LTE diventa temporaneamente inefficiente. Una delle procedure di recupero prevede l'uso dei pedali quanto più possibile, con l'inclinazione del Ciclico in avanti ed una riduzione della potenza sul Collettivo, o nel peggiore dei casi una temporanea autorotazione in modo da uscire fuori da questa condizione pericolosa.
Il pilota deve sempre avere un atteggiamento morbido e costante sui comandi evitando bruschi cambiamenti o correzioni perchè questo è uno degli errori più diffusi, sopratutto all'inizio della propria vita da pilota. Devi pensare in avanti e rimanere sempre in sintonia con la macchina con tutti i tuoi sensi, cercare di anticiparne il comportamento, perchè se il rotore entra in uno stato di Vortice Anellare le conseguenze potrebbero essere fatali se non si interviene nella giusta misura.

Tail Boom Strake
Una delle cose tra le più importanti che raccomando a chiunque voglia diventare un pilota - sia esso privato e sopratutto commerciale - è quella di innamorarsi del mezzo su cui si vola, di esplorarlo a fondo e di studiarlo nei dettagli perchè nulla è stato messo li per caso.
Parliamo ad esempio dei sottili spoiler che spesso si vedono lungo il tronco di coda. Si tratta di sottili alettoni che hanno una funzione deportante ed utilizzano il flusso proveniente dal rotore per contribuire alla spinta generata dal rotore anticoppia (Ty). La pressione che si genera sullo spoiler (Tail Boom Strake) (da non confondere con Strike) produce una pressione negativa che in una minima parte spinge il longherone nella direzione opposta e cioè nella stessa direzione di azione del rotore anticoppia. La pressione che si genera sull'alettone è pari a circa 1 hpa riducendo leggermente l'azione del rotore anticoppia aumentandone l'efficienza, se pur di poco, ma dopotutto ogni cosa può dare il proprio contributo, perfino un sottile spoiler come quello sul longherone di coda.
©Gino D'Ignazio Gizio