Meccanica del volo dell'elicottero
In questa sezione: Velocità indotta; Effetto suolo; Velocità indotta in Traslazione; VNE; Hoverin in effetto suolo; Hovering fuori effetto suolo.
Velocità indotta
Durante il funzionamento del ROTORE l’elicottero genera una differenza di pressione tra la massa D’ARIA che lo sovrasta e la massa D’ARIA al di sotto di esso. La logica conseguenza di questa azione è lo spostamento di una enorme massa d'aria asl di sotto di esso equivalente al suo stesso della macchina in quel dato instante, che per il terzo principio della dinamica ed il principio di Archimede farà in modo che l'elicottero riesca a galleggiare in aria.
Abbiamo visto nei capitoli precedenti come le quattro forze fondamentali Portanza; Peso; Spinta; Resistenza equilibrandosi a vicenda pemettono il volo di un aeromobile, questi elementi sono alla base della meccanica del volo dell'aereo cosi come quello dell'elicottero, sebbene nel nostro caso siano le "ali rotanti" a produrre la Portanza necessaria al volo. Nella realtà ci sono numerose teorie che spiegherebbero il generarsi della Portanza, ma nessuna di esse spiega con chiarezza la questione. La teoria più diffusa relativa ai momenti aerodinamici a cui sono soggette le pale sembra essere la più consistente.
Il
flusso di aria che viene generato dal rotore, chiamato Campo Aerodinamico
(Downwash) Vf si comporta in
maniera diversa a seconda della distanza della macchina da terra - come
vedremo in seguito - e la forma che esso assume ricorda quella di
un imbuto, infatti il rotore di un elicottero si comporta pressochè
come un elica intubata rispondendo alla teoria di Froude,
che stabilisce che l'aria accellerata si considera indipendente
dall'aria circostante e che quindi il moto di essa avvenga attraverso
un tubo di flusso virtuale. Infatti poichè il tubo
virtuale somiglia molto ad un tubo Venturi, sia
la velocità che la pressione
dell'aria che lo attraversano assumono valori opposti. Il rotore infatti
imparte un'accellerazione alla massa d'aria che inizialmente (al di
sopra del rotore) ha una velocità uguale a zero, ed anzi è
proprio in quella zona che si crea una depressione. La pressione
statica infatti diminuisce man mano che l'aria attraversa il
disco rotore accellerando le particelle d'aria che lo attraversano trasformandosi
in pressione dinamica che aumenta sempre
più, fino a raggiungere un valore doppio al di sotto della fusoliera,
proprio come quello che avviene attraverso un tubo Venturi.
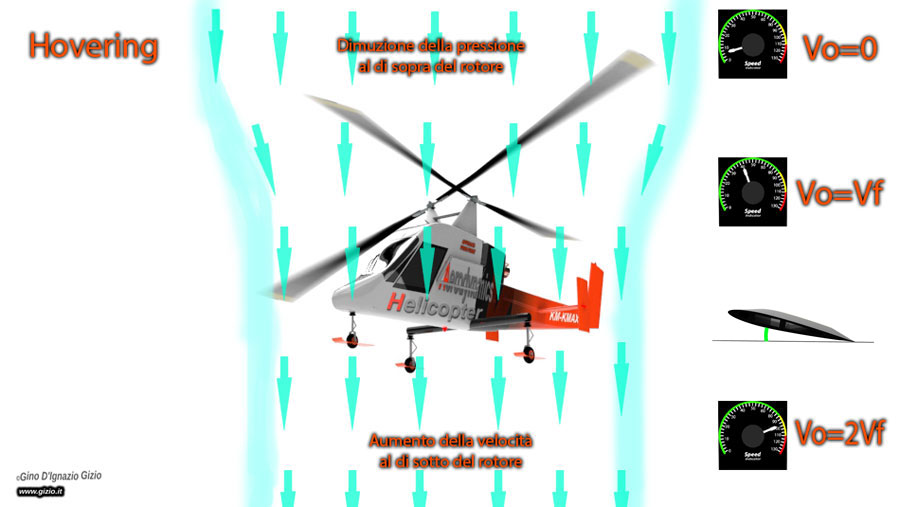
Dunque nella parte SUPERIORE la pressione Statica DIMINUISCE, viceversa nella parte INFERIORE la pressione Dinamica AUMENTA a conferma dal principio di continuità che stabilisce che all'aumento dell'una corrisponde la diminuzione dell'altra. La massa d'aria accellerata dal rotore dipende dall'area delle pale e dal numero dei giri (RPM) a cui esse sono sottoposte.
La velocità che la massa d'aria raggiunge è definita con il termine di Velocità Indotta Vi (Induced Velocity Vi). La spinta è tanto maggiore quanto maggiore è l’incremento di VELOCITA’ subita dal fluido. Il flusso d'aria o Campo aerodinamico (Downwash) è funzione diretta dell'area del disco rotore, infatti maggiore è la dimensione del condotto virtuale che si forma attraverso il rotore, maggiore è la quantità di aria che agisce su di esso e quindi minore sarà la Vi richiesta. Infatti i rotori di grandi dimensioni producono un flusso Vf (downwash) inferiore in proporzione alla superficie del disco rispetto a rotori più piccoli, per questo la rivoluzione (RPM) di un rotore di grandi dimensioni è molto inferiore se paragonata agli elevati RPM di un rotore di piccole dimensioni.
Osservando il Downwash (Campo Aerodinamico) prodotto dal rotore si può notare che esso è suddiviso in due porzioni principali, infatti la metà della velocità impressa al flusso avviene al di sopra del rotore, dove la pressione statica diminuisce considerevolmente, mentre l'altra metà del processo di accellerazione avviene al di sotto di esso, laddove la pressione dinamica aumenta considerevolmente fino a generare la spinta verso l'alto dell'elicottero. Il valore massimo di velocità indotta Vi viene solitamente raggiunto ad una distanza dal rotore pari a circa due volte il diametro di esso; in quella zona il flusso d'aria si sta spostando al doppio della velocità iniziale Vi. Poichè l'aria è soggetta ad inerzia essa subisce un aumento del momento, che si esprime grazie alla seconda legge della dinamica (F=m*a). Il flusso indotto infatti impiega qualche secondo prima di aumentare la sua velocità e questo spiega il fatto che l'elicottero risponde con un leggero ritardo sui comandi.

Vi
sono diversi sistemi per calcolare la Vi, un'altro
sistema è mediante la risoluzione della radice quadrata del RAPPORTO
tra il PESO dell’elicottero sul prodotto di ro
(ρ=densità
dell'aria)
per due per la superficie del disco.
Il valore di calcolo della PORTANZA in volo stazionario
si ottiene mediante il prodotto di due volte ro (ρ)
per la SUPERFICIE DEL DISCO per la VELOCITA’
INDOTTA².
Ci sono quattro principali forze che agiscono su di un elicottero quando questi è in volo traslato, esse sono: Peso; Resistenza Parassita; Spinta verticale (Total Rotor Trust) ed Spinta orizzontale (Horizontal Rotor Trust). La Spinta verticale (TRT) si oppone al Peso, mentre la Spinta orizzontale (HRT) si oppone alla Resistenza parassita. L'asse virtuale di rotazione delle pale rappresenta la Spinta verticale TRT ed è perpendicolare al piano di rotazione delle pale, in altre parole quando il disco del rotore viene inclinato in avanti la componente verticale di spinta poichè è perpendicolare al piano di rotazione del rotore si inclina nella stessa direzione sopratutto in volo traslato, mentre corrisponde all'asse del mast quando il rotore è a riposo in posizione neutrale.
In condizioni di VOLO TRASLATO l'effetto suolo diminuisce con l'aumentare della velocità, perchè il flusso viene deviato verso la coda della macchina, invece la portata d’aria è maggiore poichè la vena fluida investe obliquamente il ROTORE, con il risultato vantaggioso di limitare la potenza necessaria al volo, infatti una volta decollati dopo alcuni secondi in fase di accellerazione l'elicottero tende a cabrare, e risulta necessario riequilibrare la potenza abbassando leggermente il collettivo mantenendo inclinato in avanti il ciclico per garantire il volo livellato.
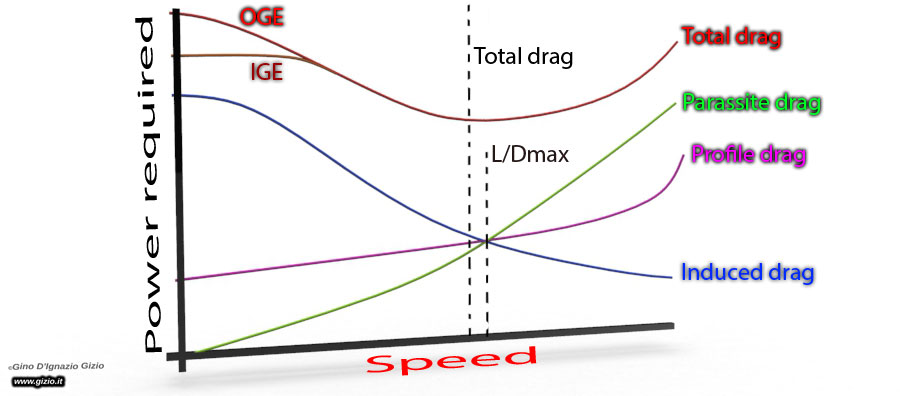
La Resistenza Parassita aumenta addirittura con il quadrato della velocitಠmentre essa è zero in hovering. Sulle pale invece vi è un aumento della resistenza di profilo poichè la pala avanzante produce maggiore portanza e dunque maggiore resistenza, vi è tuttavia un punto laddove la Resistenza Parassita e la Resistenza Indotta raggiungono il migliore rapporto Portanza/Peso che nel grafico sotto corrisponde al punto in cui le loro curve si incrociano. (Vedi manuale di volo del tuo elicottero)
Durante il decollo, man mano che la velocità aumenta si genera nuova portanza intorno ai 35 Kts, (Transational lift) e la macchina sembra voler alzare il muso per rallentare e salire in quota, perchè la TRT si somma alla HRT e questo richiede minore potenza. Infatti in questa fase si riduce leggermente il Collettivo continuando a mantenere il ciclico in avanti così che l'elicottero acquisti sempre più velocità fino a stabilizzarsi intorno ai 70 Kts, quando a causa della RESISTENZA PARASSITA prodotta dalle caratteristiche aerodinamiche della fusoliera - che influenzano l'aerodinamica del velivolo condizionandone l'assetto - fa in modo che la macchina mantenga un assetto leggermente picchiato lungo tutta la durata del volo traslato, tant'è che gli elicotteri di ultima generazione come l'AW139 hanno il mast leggerente inclinato in avanti in modo tale che in volo traslato la fusoliera ha un bassissimo grado di beccheggio, anzi rimane piuttosto livellata.
Velocità indotta in traslazione
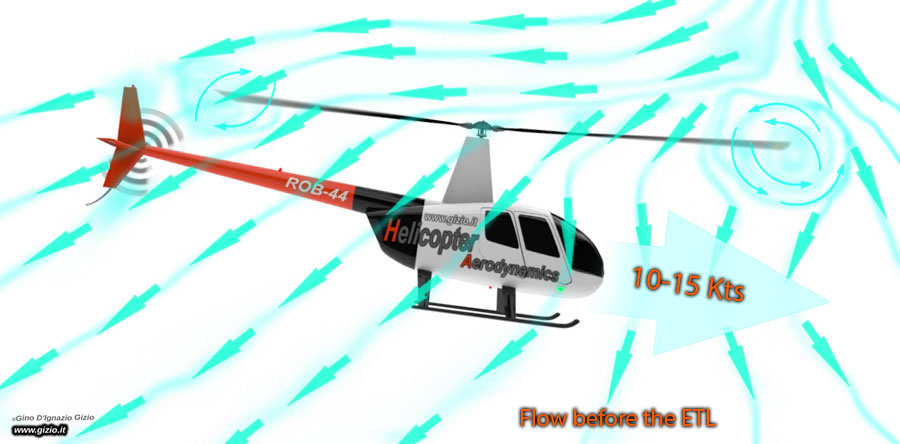
La Portanza in Traslazione si forma quando la macchina passa dal volo stazionario al volo rettilineo in qualsiasi direzione, anche se qui in buona sostanza mi riferirò alla direzione in avanti. In questa fase il Flusso Indotto (Induced Flow) viene a ridursi e viene anche a diminuire la resistenza indotta mentre l'angolo di attacco aumenta. Durante la fase di traslazione pur non aumentando la potenza la macchina continuerà la sua ascesa incrementando contemporaneamente la velocità. Questo tipo di Portanza si chiama Portanza di Traslazione (Transational Lift) e questo avviene anche sul rotore di coda che spiega il motivo per il quale durante la fase di decollo il pedale destro (Rotazione americana) diventa molto decisivo. La velocità alla quale avviene un rapido cambiamento della direzione del flusso ed un aumento dell'efficienza del rotore è definito come Effettiva Portanza di Traslazione (Effective Translational Lift) e questo comincia ad avvenire intorno ai 12-15 Kts.
Durante la fase di volo traslato la concorrenza di entrambi flussi d’aria - quello verso il basso prodotto dalla velocità indotta dal rotore, e quello che riverbera successivamente all'impatto con il suolo - produce una TURBOLENZA del flusso totale, il prodotto di questa condizione è un elevato livello di vibrazioni che si scaricano sulle pale sotto forma di sollecitazioni meccaniche, e sono questi i fenomeni legati all’effetto suolo, che si generano finchè l'elicottero rimarrà prossimo al suolo. In questa fase di volo, in modo particolare al rientro da una missione ed in fase di avvicinamento, si notano vibrazioni che aumentano man mano che ci si avvicina alla superficie, esse si mantengono tuttavia nei limiti ed avvertono il pilota che egli è in prossimità di una superficie.
VNE (Velocity Never Exeed)
I momenti prodotti dal beccheggio su una pala sono molto importanti. Ad alta velocità ad esempio i rotori con pale a dorso molto curvo (Cambered Blade) tendono a portare il muso verso il basso con un notevole angolo di becchieggio in picchiata, nonostante si cerchi di correggere con il ciclico portandolo all'indietro. Questo indica che la macchina ha raggiunto la massima velocità sostenibile prima che il fenomeno della dissimetria di portanza tra la pala avanzante e quella retrocedente abbia raggiunto valori critici, sia per l'una che per l'altra. Il limite massimo delle VNE diminuisce con l'aumentare della quota poichè la densità del fluido diminuisce sempre più ed il rendimento aerodinamico fa lo stesso. Infatti a bassa densità si dovrà aumentare l'angolo di attacco per poter compensare e per poter ottenere la medesima Portanza ed oltretutto la lettura dell'ASI (Air Speed Indicator) darà valori falsificati rispetto a quelli reali, dunque i fattori che impongono un limite alla velocità di un elicottero sono molteplici, vediamo quali:
Pala Retrocedente: La pala retrocedente entra in uno stato di stallo abbassandosi, e questo fenomeno aumenta dalla periferia della pala verso l'interno di essa in maniera esponenziale.
Inversione del Flusso d'Aria: Si tratta del'inversione del flusso aerodinamico che invece di scorrere all'indietro - cioè dal bordo di attacco verso il bordo di uscita - si muove nel verso opposto e lo fa dalla radice della pala spostandosi verso la sua estremità, perchè la pressione sul ventre è maggiore che sul dorso e quindi vi è un movimento del flusso dalla zona di alta verso la zona di bassa pressione; come già descritto in più occasioni nei capitoli precedenti.
Escursione del comando Ciclico: Come già detto soprà la quota di volo ha un forte effetto sulla densità dell'aria che diminuisce con l'ascesa e questo viene ancor più aggravato dal peso della macchina, che rende l'escursione del ciclico sempre più ampia con effetto inversamente proporzionale sulla risposta. In altre parole il pilota dovrà ampliare la sua azione sul ciclico per avere lo stesso corrispondente effetto che otterrebbe ad una quota più bassa. A questo si aggiunge il forte stress meccanico che comincia a generarsi sulla pala poichè essa è sempre più sottoposta da una costante e ritmica alternanza di condizione tra l'essere avanzante e poi diventare retrocedente e cosi via; insomma una sorta di dilemma Shakespiriano in versione aerodinamica.
Compressibilità della Pala Avanzante: La pala avanzante si trova in una condizione opposta a quella retrocedente e cioè la velocità del flusso che la investe è sempre più vicina a quella di Mach che non deve mai superare il valore di 0.92. A questo si aggiunge il fattore Potenza che diminuisce con l'aumetare della quota, in modo particolare da parte dei motori alternativi, che sono molto più sensibili alla diminuzione di densità dei motori a turbina.
Altitudine di Densistà (Densisty Altitude) : Tutti i fattori già elencati indicano che maggiori sono i valori come l'altitudine maggiori sono gli effetti negativi sulle pale e sui motori. Un esempio classico è quello che vede il Bell 212 volare ad una quota di 10000 ft con una VNE di 108 kts. Con una temperatura di 30°C ad una quota di 1500 ft ed un QNH di 1003 hpa sarebbe come se esso volasse ad una quota di 4000 ft che porterebbe la VNE ad un limite di circa 105 Kts.
Hovering in Effetto suolo
La terza legge della dinamica di Newton recita: Ad ogni azione corrisponde una reazione uguale e contraria. Per un elicottero l’azione equivale a produrre un flusso d’aria spinta al di sotto della macchina uguale al peso della stessa, per ogni secondo di volo, questa azione forzata evidentemente spingerà la macchina nella direzione opposta, e cioè verso l’alto, pompando una quantità di aria al di sotto di esso pari al peso della macchina stessa e del suo contenuto per ogni secondo di volo determinando la reazione e cioè l'ascesa verso l'alto della macchina.
In fase di volo stazionario l'elicottero sembra galleggiare su un fludo invisibile, esso vola appoggiato su di un cuscino d'aria, questa condizione si chiama Volo in Effetto Suolo, (In Ground Effect) perchè si è in prossimità di una superficie che crea il fenomeno sopra descritto. Il piano di rotazione del rotore rimane orizzontale, l’angolo di attacco delle pale varia al variare della potenza applicata, ma il numero di giri rimane sempre costante, in questo modo si otterrà una spinta verso l’alto costante e controllata. Viceversa una diminuzione dell’angolo di attacco delle pale ridurrà la spinta verso il basso della massa d’aria, con il conseguente avvicinamento di essa verso il suolo.
Spesso quando si effettua la manovra di atterraggio da punto fisso, si avverte una sorta di resistenza da parte dell'elicottero a volersi posare sulla superficie su cui esso galleggia. Bisogna abbassare lentamente ed in maniera costante il Collettivo affichè si tocchi con almeno un pattino la superficie al di sotto. La macchina macina costantemente aria che rimbalza turbolenta verso le pale, e non riesce a mantenersi da sola ferma in aria rispetto ad una posizione scarrocciando in avanti e di lato lentamente, questo anche grazie alle sue caratteristiche di stabilità ed alla qualità del vento in quel dato punto. Il pilota deve mantenere un punto di riferimento esterno, tanto quanto basta per mantenerla stabile rispetto ad un edificio, una automobile parcheggiata, o perfino un sasso al suolo, agento con piccole correzioni sopratutto sul comando Ciclico, cercando di anticipare la tendenza di scarrocciamento dell'elicottero e continuando ad abbassare lentamente il Collettivo fino a quando l'elicottero non ha toccato terra.
Quando
l’ELICOTTERO si mantiene a brevissima distanza
dal suolo in volo stazionario, l’aria che viene spinta verso il
basso dalla macchina non è in grado di disperdersi completamente,
ma rimbalza e sfugge lateralmente con velocità inferiore a quella
che gli è stata impressa, inoltre la massa d'aria rimescolata
costantemente dal rotore ha una notevole inerza. Questa condizione continua
di perturbazione dell’aria che tocca la superficie al di sotto
della macchina, per poi risalire ad una velocità inferiore scontrandosi
con le masse successive che compiono lo stesso circuito, genera una
zona di perturbazione che produce vibrazioni rendendo l'elicottero particolarmente
instabile in volo.
Il flusso d’aria durante il volo in hovering si comporta in modo
molto particolare, la macchina infatti è soggetta ad una serie
di fenomeni che rendono il volo stazionario particolarmente irrequieto
a seconda che si voli in, oppure fuori effetto suolo. In Effetto
Suolo IGE (In Ground Effect) la Velocità
Indotta Vi è inferiore rispetto ad una condizione di
volo Fuori Effetto Suolo OGE (Out of Ground effect).
Hovering fuori effetto suolo
Durante la rotazione delle pale si generano vortici alle estremità di esse, questi producono la resistenza indotta, una condizione che genera delle turbolenze importanti - di cui abbiamo gia parlato nella sezione dedicata alla Resistenza - che hanno un effetto considerevole sulle prestazioni della macchina in volo. In termini matematici è possibile calcolare in un elicottero bipala con rotore che abbia un regime di rotazione pari a 350 RPM, la quantità di circoli turbolenti che si generano alle estremintà delle pale che in queste condizioni è pari a 700 circoli turbolenti per minuto.

I
vortici periferici sono la prima causa della necessità
di maggiore potenza in volo stazionario, in quanto parte della superficie
del rotore risulta inefficiente aerodinamicamente.
Durante la rotazione infatti le pale deviano una larga porzione di aria
al di sotto della macchina, questo processo di pompaggio richiede una
notevole quantità di potenza per accelerare l’aria ad una
relativa velocità, infatti la Vi (Velocità Indotta)
aumenta notevolmente e questo valore è in stretta correlazione
sia in rapporto alle dimensioni che al peso della macchina, inoltre i
vortici marginali che si formano alle estremità delle pale sono
maggiori di quelli che si formano in effetto suolo e questo riduce considerevomente
la superficie portante del rotore.
Risulta chiaro dunque che in volo stazionario la potenza richiesta necessaria al sostentamento dell’aeromobile risulta maggiore.
Infatti il volo in effetto suolo - come già detto - l'elicottero è soggetto ad interferenze aerodinamiche del flusso aereo, che riverbera a terra riducendo la velocità del flusso indotto, quindi della resistenza relativa ed una più contenuta dimensione dei vortici marginali, con un evidente minore impiego di potenza disponibile. I vortici periferici o marginali (Tip vortex) vengono drammaticamente ridotti in effetto suolo aumentando l’efficienza aerodinamica del rotore perchè essi sono vicini ad una superficie che ne contiene le dimensioni, più o meno come avviene per le eliche intubate.
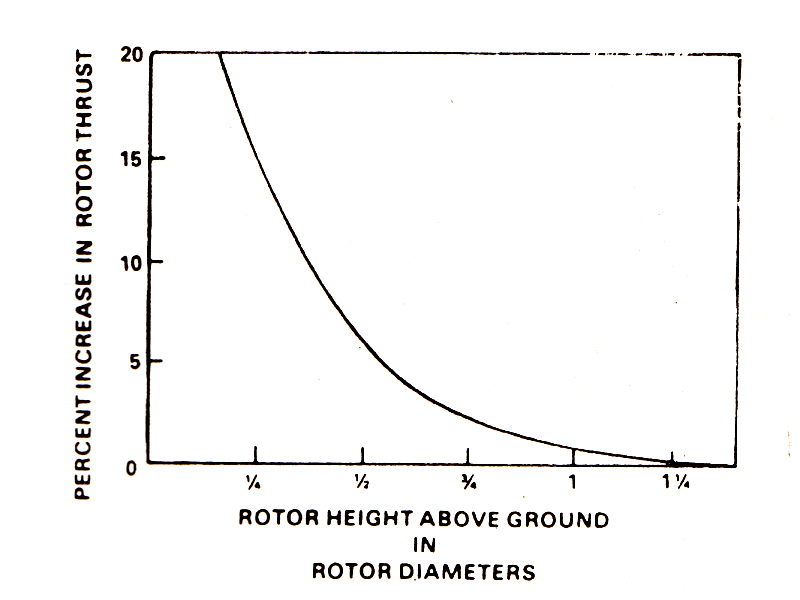
La
figura illustra come in misura percentuale l’efficienza del rotore
possa variare in relazione alla distanza dal suolo. Diversamente durante
il volo fuori effetto suolo l’efficienza sarà notevolmente
inferiore perché in quelle condizioni vi sarà un aumento
notevole della velocità indotta che produce un aumento delle
dimensioni dei vortici periferici alle estremità delle pale.
Dunque a parità di condizioni di volo stazionario sarà
richiesta una potenza inferiore in hovering IGE piuttosto
che in hovering OGE. Concludendo in condizioni di volo
fuori effetto suolo sarà richiesta una potenza maggiore con un
elevato angolo di attacco.
La manovra di HOVERING dopo quella di autorotazione
è una delle mie preferite. Portare la macchina in volo a pochi
metri dal suolo, sentirsi galleggiare nell’aria godendo del piacere
della fatica che l'elicottero compie per rimanere in volo, è
una delle cose più impagabili della magnificità di questa
straordinaria macchina. Per un pilota questa è senza dubbio la
manovra più importante, perché egli sarà in grado
- con il tempo e l’esercizio - di essere capace di sviluppare
una precisione di controllo sempre maggiore sui comandi, affinchè
l'elicottero mantenga una posizione stabile in termini di quota, assetto
e posizione in volo.
Durante la manovra di volo stazionario in effetto suolo, il pilota è
impegnato in piccole correzioni soprattutto di ciclico attraverso l’osservazione
di un punto di riferimento sull’orizzonte, che gli permette di
stabilire l’entità degli spostamenti che l’aeromobile
tende a fare nel tempo.
©Gino D'Ignazio Gizio