I tre assi di movimento di un Elicottero
In questa sezione: Asse Longitudinale; Asse Verticale; Asse Trasversale; Volo Stazionario; Volo Traslato; Volo in Autorotazione
L’Elicottero può muoversi attraverso tre assi principali che ne rappresentano la libertà di spostamento nello spazio. I tre assi si incontrano in un punto preciso: il suo Centro di Gravità o baricentro. Quando l'elicottero è perfettamente livellato allora non si ha alcuna accellerazione su alcuno dei tre assi, diversamente se si genera una accellerazione (movimento) intorno ad uno o più assi si ottiene uno spostamento nello spazio dell'aeromobile.
Ogni aeromobile
può muoversi liberamente attraverso questi tre spostamenti. Questa
possibilità ne determina il livello di manovrabilità che
è dato dalla velocita/arco descritto
massima ottenibile in rotazione su ogni singolo asse.
Un velivolo acrobatico come un aereo militare puo compiere manovre rapide
grazie ad alcune caratteristiche intrinseche della sua struttura adatta
a questo tipo di manovre, ma anche grazie al rapporto tra la velocità
di rotazione sui tre assi moltiplicato per l’ampiezza dell’arco
prodotto dalla rotazione lungo quel dato asse nel tempo, che sarà
più breve se paragonato al tempo di rotazione di un velivolo
da trasporto. In altre parole minore sarà il tempo impiegato
per compiere una determinata rotazione, maggiore sarà il livello
di manovrabilità del velivolo.
E’ evidente che una virata spinta o un loop, saranno possibili
proprio grazie a questo rapporto. Negli elicotteri questo rapporto è
in generale piuttosto limitato, anche se ci sono macchine e piloti che
sono in grado di compiere manovre acrobatiche impegnative, tuttavia
questa limitazione in alcuni casi può essere perfino interessante
e vantaggiosa.
Se si considera ad esempio la rotazione lungo l’asse verticale prodotta dall’azione di un propulsore adatto, che genera una accellerazione angolare, rappresentato nei modelli convenzionali cioè dotati di rotore anticoppia, che permette di cambiare direzione all'elicottero, dando la possibilità alla macchina di ruotare su se stessa mantenendo un punto fisso in volo, ci si rende conto di quanto l'elicottero sia estremamente interessante sotto il profilo della manovrabilità e della potenzialità utilissime nei vari ruoli che occupa.

Asse longitudinale
E’ l’asse che attraversa la fusoliera in due punti di secanza, rispettivamente dal muso alla coda; il movimento intorno a questo asse si chiama ROLLIO (roll). Il movimento di rollio si ottiene spostando al lato desiderato il comando ciclico - spesso impropriamente chiamato “cloche” – ottenendo - se in fase di volo traslato - la manovra di VIRATA. L’inclinazione del DISCO ROTORE lateralmente conferisce lo spostamento nella stessa direzione dell'intera fusoliera che viene trascinata dal disco rotore creando cioè una accellerazione intorno all'asse longitudinale del velivolo.

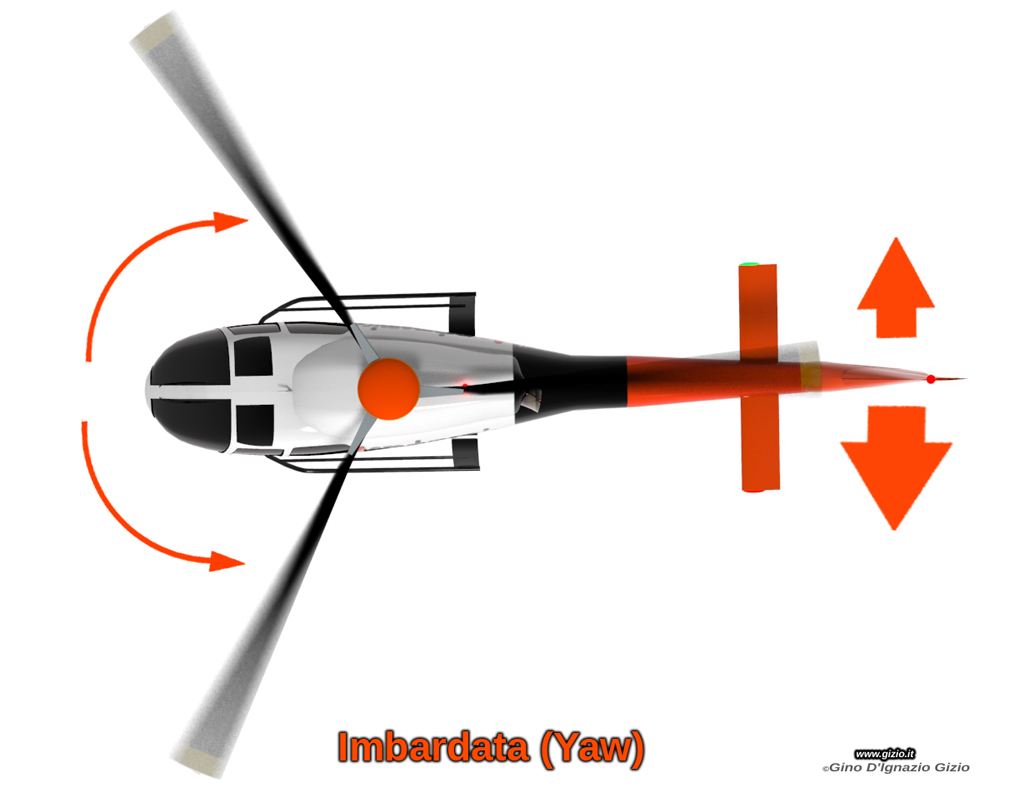
Asse verticale
E’ l’asse rappresentato dalla linea retta immaginaria che passa per il CENTRO DI GRAVITA’ dell’aeromobile, durante la fase di volo il movimento intorno a questo asse è chiamato IMBARDATA (yawing). Detto movimento si ottiene agendo sulla pedaliera che a sua volta agirà sul rotore anticoppia, aumentando o diminuendo la spinta laterale della coda stessa che per "azione" risulterà ovviamente in una rotazione nella direzione opposta della prua.
Negli
elicotteri con rotore coassiale controrotante, come sul
KA32,
il controllo dell'imbardata avviene attraverso l'incremento del collettivo
di un rotore, contemporaneamente alla diminuzione dell'altro. Questo produce
uno sbilanciamento proporzionale della coppia risultante tra i due, con
la rotazione risultante nella direzione del momento avente valore inferiore.
Nei rotori in tandem come il CH47,
entrambi i piatti oscillanti dei due rotori che inclinano i due rotori
in direzioni lateralmente opposte, generando una rotazione intorno al
centro di gravita della fusoliera attraerso il quale l'asse verticale
passa. Mentre nei rotori intersecanti, come il K-MAX,
i due rotori verranno inclinati uno in avanti e l'altro all'indietro in
modo da creare una rotazione della fusoliera in una data direzione.
Asse trasversale
E’
questa la linea retta che passa per il CENTRO DI GRAVITA’
e taglia letteralmente la fusoliera trasversalmente attraverso il suo
baricentro. Il movimento intorno a questo asse si chiama BECCHEGGIO
(pitch). Anche in questo caso si agisce sul comando ciclico,
spingendolo in avanti o viceversa all'indietro, in altre parole inclinando
il rotore in quella data direzione. La fusoliera ruoterà lungo
l’asse trasversale determinando il comportamento di PICCHIATA
se in avanti, e CABRATA se all’indietro, poichè
si sarà prodotta una accellerazione intorno all'asse trasversale
in un senso o nel senso opposto.

L’elicottero per le sue caratteristiche di alta versatilità consente la massima libertà dei movimenti nello spazio e grazie alle sue proprietà può effettuare fondamentalmente quattro tipi di volo, tutti attraverso la sola ed unica azione del rotore principale. Essi sono rispettivamente: VOLO STAZIONARIO; VOLO VERTICALE; VOLO TRASLATO; VOLO IN AUTOROTAZIONE. Passeremo ora ad analizzare queste quattro proprietà di volo singolarmente e come esse vengano descritte attraverso le leggi fisiche che regolamentano il volo di questa macchina.
Volo stazionario
E’
la manovra durante la quale si mantiene l'aeromobile ad una quota costante
e velocità uguale a zero rispetto ad un punto fisso al suolo.
In tale condizione il peso dell’elicottero è perfettamente
bilanciato dalla forza di sostentazione del rotore, che naturalmente
mantiene anch’esso una rivoluzione costante. Infatti è
bene precisare che la rotazione del rotore è sempre costante
o quasi, è cioè il numero di giri rotore (RPM)
devono essere contenuti in un arco di valore molto ristretto ed il monitoraggio
avviene attraverso il doppio contagiri visibile sul pannello strumenti,
che indica il valore di RPM sia del rotore che della trasmissione, i
quali pero devono rimanere all'interno di un arco verde che ne indica
i limiti operativi, mentre la variazione di portanza avviene solo attraverso
la variazione dell’angolo di attacco delle pale.
Se la forza di sostentamento tende a diminuire si otterrà il
volo in DISCESA, e cioè si verficherà
la riduzione della spinta ascendente, in questo caso con valore negativo;
il peso della macchina risulterà cosi maggiore del peso della
massa d’aria spinta al di sotto dell'aeromobile per ogni dato
secondo di volo. L'elicottero per potersi mantenere in volo deve spingere
al di sotto della fusoliera una quantità pari o superiore al
proprio peso che per effetto della terza legge della dinamica ne provocherà
un galleggiamento o un ascenzione verso l'alto.
Il giorno in cui farai il primo volo di familiarizzazione, il tuo istruttore porterà la macchina in volo stazionario vicino al suolo e potrai percepire il lavoro intenso e costante che tutti gli organi meccanici ed aerodinamici dell'elicottero compiono lottando per mantenere la fusoliera in volo.
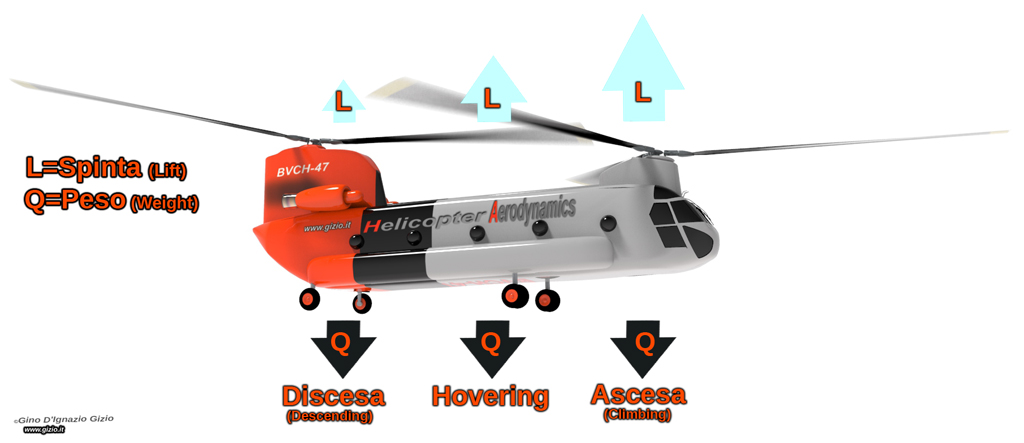
Viceversa se si incrementa la spinta, aumentando l'angolo di attacco delle pale si potrà generare la manovra di ASCESA o SALITA. In questo caso infatti la spinta risulterà maggiore, cioè la massa d’aria accelerata al di sotto dell’elicottero avrà una portata maggiore del proprio peso totale, o se si preferisce il peso della macchina sarà inferiore al peso della massa d’aria spinta per ogni secondo. Questa interessante condizione di volo si basa sul terzo principio della dinamica che stabilisce che ad ogni azione corrisponde una reazione uguale e contraria, oppure al principio di galleggiamento di un corpo secondo Archimede, che stabilisce che un corpo si mantiene a galla ricevendo una spinta dal basso verso l'alto pari al proprio peso. Per concludere, il volo stazionario si ottiene attraverso un equilibrio che ha in esso una differenza tra il rapporto esistente in quel dato instante tra la PORTANZA generata dal rotore ed il PESO dell'aeromobile, che in questo caso sarà uguale a zero, cioè priva di accellerazioni verso l'alto o verso il basso.
Questo
tipo di manovra è conosciuta anche come volo a punto fisso o
HOVERING. Nella pratica reale questa manovra è
particolarmente impegnativa, e coinvolge il pilota nella sua totalità.
Imparare ad eseguire questa manovra con precisione, è a mio avviso
- cosi come la manovra di autorotazione – tra le abilità
acquisibili più importanti per formare un bravo pilota.
Buona parte della professione di pilota di elicottero prevede un largo
utilizzo di manovre di questo tipo, del resto la bellezza di questa
macchina risiede sopratutto nel essere in grado di galleggiare in un
punto fisso nello spazio e di poter atterrare su una qualsiasi superficie.
Il volo
a punto fisso è stato il primo è più eccitante
momento della mia vita di pilota, quando iniziavo il mio corso di formazione
presso la Scuola Nazionale Elicotteri di Lugo di Romagna,
accompagnato nella mia prima missione dal comandante Montagnino.
Un tipetto con accento siciliano e con occhiali fondi, ma con una verve
ed un carattere straordinario.
Non ho mai dimenticato quel momento e le successive occasioni che ho
vissuto quando mi divertivo a rimanere li fermo in un punto ad osservare
il mondo, che sia stato con il mio elicottero in effetto suolo su un
prato di erba o fuori effetto suolo. Quella posizione mi dava una sensazione
tra le più belle che si potessero vivere. In volo stazionario
si percepisce la lotta costante che la macchina con tutte le sue componenti
meccaniche ed aerodinamiche cerca di fare per mantenersi in volo, immersa
nel suo rumore e nell'aria che macina, senza esitazione anzi con determinazione,
mentre l'erba al di sotto di essa viene piegata dal peso dell'aria che
è accelerata al di sotto della fusoliera.
La percezione
e l'azione del pilota sono importanti durante questa manovra, l'elicottero
in effetto suolo vibra e si muove notevolmente, scarrocciando perché
sottoposto al riverbero del flusso d'aria che una volta colpito il suolo
interagisce di nuovo con la massa d'aria che gli va incontro e tutto
questo in un ciclo continuo. E' importante fissare uno o più
punti di riferimento sull'orizzonte e rimanere in contatto con il proprio
bacino, perché questi due importanti elementi forniranno al pilota
preziose informazioni non solo sulla sua precisa posizione nello spazio
della macchina, ma anche sull'imminente tendenza che essa ha nello spostarsi
in una data direzione, giacché essa insiste a non stare ferma.
Cosicché un importante ed altrettanto delicato movimento sia
sul ciclico che sui pedali, risulta necessario per mantenere la posizione
costante dell'aeromobile anticipado gli spostamenti che l'elicottero
cerca di compiere scivolando lentamente in tutte le direzioni.
Osservare un elicottero volare in punto fisso dall'esterno perfettamente
immobile, significa pensare ad un pilota piuttosto impegnato tra punti
di riferimento visivi; coordinamento tra ciclico e pedaliera, e riflessioni
su una eventuale manovra di auto-rotazione in caso di piantata motore.
Durante il volo stazionario si hanno due condizioni particolari e di
conseguenza due comportamenti diversi da parte della macchina: l’Hovering
in effetto suolo (IGE), cioè in prossimità
di una superficie e l’Hovering fuori effetto
suolo (OGE), e cioè ad una distanza notevole
da una superfiie. Questi sono argomenti che tratteremo nei dettagli
più in avanti.
Volo traslato
Per ottenere il volo traslato è necessario inclinare il DISCO ROTORE in avanti, il rotore infatti da forma ad un vero e proprio disco virtuale che si comporta come una sorta di ala. Il disco rotore fornisce delle prestazioni davvero uniche, esso rappresenta la vera forza di sollevamento della macchina; si comporta proprio come una sorta di elica spostando ad alta velocità una grande massa di aria, pari o superiore al peso dell’aeromobile, per garantirne il sostentamento in volo dell'intera struttura. Ma la cosa più interessante rimane il fatto che il flusso di aria possa essere deviato in qualunque direzione si voglia, e questo determinerà lo spostamento dell'elicottero nella direzione opposta del flusso accelerato che il rotore produce per ogni dato secondo di volo. Il rotore dunque una volta inclinato genera una componente della FORZA AGENTE, che produce il movimento voluto.

La terza
caratteristica è che il rotore stesso in volo traslato si comporta
più o meno come un’ala, in quanto la sua superficie nel
complesso genera una portanza, che è data dalla somma delle portanze
generate su ogni singola pala ed in tutti i punti del disco durante
la rotazione.
Il rotore in volo traslato acquista una portanza superiore a quella
che esso genera in volo stazionario (Hovering). La
sensazione che si percepisce durante la fase di transazione dal volo
stazionario (Hovering) al volo traslato, è un
improvvisa ascesa che si avverte più o meno intorno i 35
nodi (Knots). La prua d’improvviso cabra leggermente
e si avverte una rotazione in una direzione che bisogna correggere con
i pedali per mantenere la fusoliera in assetto, nel frattempo la portanza
di traslazione (translation lift) comincia
a generarsi. In questa fase infatti si riduce gradualmente la potenza
disponibile ai valori di volo di crociera. Come vedremo infatti la potenza
richiesta in volo stazionario (Hovering) è sempre
maggiore rispetto a quella necessaria durante il volo traslato, proprio
perché il rotore si comporta come un ala generando una portanza
attraverso il disco rotore, sebbene le cose in realtà siano leggermente
più complicate ma al momento possiamo avvalorare questa esposizione.
Volo in autorotazione
Questa condizione è permanente nell’autogiro, esso infatti vola costantemente in auto-rotazione. Il termine stesso descrive la dinamica di un meccanismo che tratteremo più in avanti nei dettagli, tuttavia in questa fase si può sintetizzare l’idea in poche parole. In breve il rotore di un autogiro gira liberamente, cioè non è affatto collegato ad alcun meccanismo o trasmissione. Esso viene semplicemente investito da una corrente aerodinamica che proviene frontalmente dal basso, cioè un vento relativo, che lo mantiene in rotazione spontanea lungo tutta la durata del volo.
Per semplificare ed essere più chiari, l'autogiro e l'elicottero utilizzano la spinta di sostentamento in maniera diammetralmente opposta. L'elicottre è costretto a spingere una massa d'aria attraverso il rotore (medante l'ausilio di uno o più motori) al di sotto della fusoliera pari o superiore al suo peso per potersi mantenere in volo, mentre l'autogiro si sostiene in volo perchè una massa d'aria pari o superiore al suo peso proviene dal basso verso l'alto attraversando il rotore che però è a folle.
Gli autogiro come detto sopra non hanno il rotore principale collegato al motore, mentre è l’azione di un elica spingente o traente che muove la fusoliera orizzontalmente, spingendo la macchina costantemente attraverso il vento relativo. Il rotore attraverso il vento relativo - esattamente come accade con le ali di un aeroplano - viene investito dal flusso d'aria che genera portanza sulla superfice delle pale, producendo un fenomeno chiamato Windmill (mulino a vento) sul rotore dell'aeromobile mantenedolo spontaneamente in rotazione, perchè il vento relativo proviene dal basso con un angolo di circa 30 gradi. Le pale in rotazione formando un disco rotore come sopra descritto che genera la portanza necessaria al volo. Si può dire dunque che sia che esso sia un autogiro, sia che esso sia un eliottero in entrambi i casi si tratta di ali sono rotanti.

Anche l’elicottero è in grado di sfruttare queste proprietà auto-rotative, - per fortuna - che si dimostrano estremamente utili laddove i motori siano vittime di un’avaria. Vedremo più in avanti come si effettuerà la manovra di AUTOROTAZIONE in un elicottero e come funzionano i meccanismi che regolamentano le forze che agiscono sul rotore in questa particolare condizione di volo.
©Gino D'Ignazio Gizio