Stabilità Statica e Dinamica di un multirotore
Gli aeromobili a multirotore sono estremamente instabili e per questo richiedono una serie di sistemi integrati atti a garantire sia la stabilità Statica che quella Dinamica. Ogni singolo rotore produce una spinta, ma anche una coppia che si formano nel suo centro di rotazione, allo stesso modo esso produce anche una forte resistenza che si genera sull'intera struttura del multirotore, come sui bracci o sulle varie componenti che sono esposte ai flussi di aria provenienti dai rotori che si trasformano in turbolenze. In altre parole un Multirotore è soggetto a due principali problemi legati alla stabilità dinamica, uno di ordine aerodinamico e l'altro di tipo meccanico.
La stabilità di una aeromobile è data dalla capacità di sostenere una determinata condizione di volo in maniera costante e non imprevedibile. Il concetto di stabilita si avvicina a quello di equilibrio di una aeromobile, se infatti l'insieme di forze e momenti esercitati sull'aeromobile è uguale a zero, si determina che la macchina risulta in perfetto equilibrio per quelle determinate condizioni di volo; in altre parole la portanza deve esser uguale al peso, la spinta uguale alla resistenza e nessun altro momento o forza deve agire sulla macchina volante.
Coppia
Un multirotore è quindi costantemente sottoposto all'azione di molteplici forze, che ne disturbano lo stato permanentemente. Il problema di natura meccanica è chiamato COPPIA. Essa è generata su ogni singolo rotore ed esponenziale per tutti i rotori che sono in funzione durante il volo.
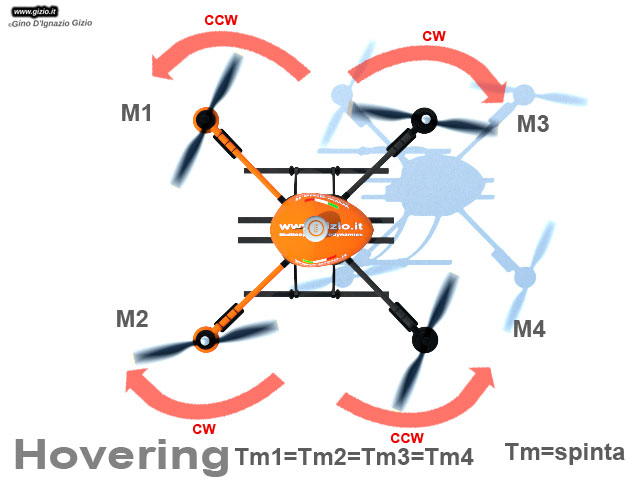
Dunque poichè ogni rotore genera una forza durante la rotazione come risultato esso ne genera una opposta, in base al principio della terza legge della dinamica che stabilisce che ad ogni azione corrisponde una azione uguale e contraria. Se l'elica ha una rivoluzione oraria (CW) il motore che la pone in rotazione tenderà a ruotare nella direzione opposta e cioè in senzo antiorario. Questo crea un serio problema di stabilità direzionale giacchè i rotori sono montati su un piano orizzontale e la coppia di reazione si scarica sul telaio della macchina sul quale essi sono fissati. Se infatti avessimo tutti i quattro rotori in rotazione nella stessa direzione, il telaio del drone ruoterebbe vorticosamente nella direzione opposta senza alcuna possibilità di controllo.
Per ovviare a questo inconveniente bisogna generare una coppia opposta facendo in modo che la metà dei rotori montati sulla macchina abbiano una rivoluzione contraria in modo da annullare la coppia di reazione prodotta dall'altra metà di essi. Per fare un esempio, su un multirotore a quattro rotori due di essi avranno rivoluzione oraria (CW) mentre gli altri due avranno rivoluzione antioriaria (CCW). Questo meccanismo genererà delle coppie di reazione su tutti e quattro i rotori che però verranno annullate reciprocamente.
Questa storia della coppia è la prima forma di disturbo della stabilità della macchina, perchè è molto difficile che le coppie che si generano abbiano tutte una perfetta ed equilibrata intensità reciproca. In realtà questo non avviene mai, tuttavia il sistema di controllo della stabilità, l'Autopilota fa in modo da regolare i motori singolarmente in modo tale da controllare l'intensità delle varie coppie che si generano, tale da annullarle numerose volte per ogni secondo di volo, attraverso l'elaborazione di speciali algoritmi e di sensori come il gruppo giroscopico-accellerometri che forniscono le informazioni di spostamento nella spazio all'Autopilota che agisce sugli ESC in modo tale che queste unità varino costantemente il numero di giri dei motori con il fine di equilibrare le coppie reciproche. Questo comportamento è perfettamente osservabile con un comune Smarth Phone. Se si prova a filmare un drone in volo stazionario, si noterà come ogni rotore abbia una rotazione assolutamente indipendente quasi da apparire casuale. In realtà è l'intero dispositivo di controllo e regolazione della stabilità direzionale che mantiene l'equilibrio del sistema motori-rotori, controllandone e variandone il regimo costantemente numerose volte al secondo.
Analizzato il problema della stabilità relativo ad una questione meccanica fatta di forze, guardiamo ora al problema aerodinamico, anch'esso piuttosto importante a proposito della stabilità dinamico di un multirotore.
Durante la rotazione ogni singolo rotore (motore-elica) sposta una determinata quantità di aria al di sotto della macchina accellerandola in modo da produrre il volo; maccanismo che analizzeremo più nei dettagli in un altra sezione. L'aria muovendosi al di sotto della macchina assume poco dopo un andamento irregolare chiamato turbolenza. Si tratta di vortici e spostamenti irregolari prodotti dalle eliche che accellerano in continuazione il fluido, poichè l'aria possiede una propria massa e quindi una inerzia relativa. Le turbolenze non si dissipano all'istante come si potrebbe pensare, anzi esse interagiscono continuamente con il flusso successivo che costantemente viene spinto verso il basso dalle pale delle eliche , scatenando un circolazione costante di aria e generazione di turbolenze lungo tutto il tempo di volo che non sono solo dirette verso il basso a sostegno del peso della macchina, ma esse incontrano tutte le irregolarità rappresentate dai componenti del multirotore, come i bracci dei motori, i pattini di atterraggio etc.
Questo stato di cose agisce sull'intero sistema rendendolo assolutamente instabile, tra l'altro non stiamo parlando di un solo rotore in azione ma di almeno quattro, che producono quattro spinte differenziate e quattro stati turbolenti irregolari, ed è la somma di tutte le forze ed i momenti che si sviluppano lungo tutto il volo del multicoptero a renderlo estremamete instabile, se poi a questo si aggiunge il problema già descritto della coppia allora risulterà facile immaginare alle estreme difficoltà che si incontrerebbero se si tentasse di controllare un multrotore manualmente senza l'ausilio di un sistema di stabilizzazione dinamico.

La somma di queste componenti rende un multirotore assolutamente instabile. Vi sono in gioco due tipilogie di stabiltà, quella statica e quella dinamica; un multirotore per sua natura è soggetto negativamente ad entrambe.
Stabilità statica
Un aeromobile è sottoposto a tre differenti tipi di stabilità. La condizione di instabilità avviene quando un aeromobile è sottoposto ad una serie di turbolenze, cioè soggetto ad uno sbilanciamento statico, quando cioè l'equilibrio è compromesso in modo tale che la prua o la coda beccheggino, cioè si muovano verso l'alto e verso il basso; per esempio ad un aumento o diminuzione della potenza dei rotori anteriori o posteriori, oppure quando avviene una variazione dell'assetto in volo, dovuto a modifiche della traiettoria etc. In ogni caso quando queste condizioni producono una serie di forze che agiscono sull'aeromobile ponendolo in una situazione di squilibrio che può essere permanente o temporanea.



Se
l'aeromobile continua a modificare l'orientamento o l'assetto dopo il
disturbo, allora si definisce la macchina STATICAMENTE INSTABILE.
Gli effetti della stabilità, avvengono sempre sui tre assi di
movimento di un aeromobile ed essi vengono definiti rispettivamente:
Stabilità Longitudinale, cioè riferita
al movimento di beccheggio; la Stabilità Direzionale,
è riferita al movimento di imbardata e la Stabilità
Laterale, riferita al movimento di rollio. Spesso la
stabilità Longitudinale e Laterale sono correlate tra loro. Un
multirotore si comporterebbe come in figura, cioè esaltando sempre
più il suo comportamento irregolare fino alla collisione con
il primo ostacolo che incontrerebbe sulla sua traiettoria.
Stabilità dinamica
Quando
avviene una condizione di sbilanciamento un aeromobile può imbattersi
in tre tipi differenti di moti oscillatori, mentre cerca di raggiungere
un equilibrio, dopo una serie di oscillazioni decrescenti; in questo
caso si definisce l'aeromobile DINAMICAMENTE STABILE.
Se l'aeromobile continua ad oscillare senza che questi movimenti diminuiscono
di intensità, allora esso si definisce DINAMICAMENTE
NEUTRO. Se l'intensità delle oscillazioni aumenta e
l'assetto comincia a cambiare rapidamente fino a rendere quasi o del
tutto incontrollabile l'aeromobile allora si definisce DINAMICAMENE
INSTABILE.

Un aeromobile che sia staticamente e dinamicamente stabile, può volare da solo, fino a quando il pilota decida di cambiarne l'assetto, o senza che egli sia per forza costretto a mantenere il constante controllo della macchina in volo. Nel nostro caso i multirotori vengono artificialmente stabilizzati attraverso l'azione matematica di calcolo dell'unità centrale. l'Autopilota riporta sempre la macchina in posizione orizzontale in volo stazionario, fino a quando non avviene un intervento da parte del pilota che intende modificarne le condizioni iniziali.
Dunque
in buona sostanza, quale è la differenza tra stabilità
Statica e Dinamica? La stabilità statica
di un aeromobile descrive la natura della macchina
e la tendenza che essa ha nel conservare la sua posizione originale,
dopo che una o più forze hanno disturbato il suo assetto originale.
La stabilità dinamica invece descrive la forma
del movimento che l'aeromobile assume sottoposto ad
una condizione di instabilità statica, quando esso cioè
cerca di riguadagnare la sua posizione originale cosi come era precedente
all'azione di disturbo.
La stabilità di un aeromobile viene descritta attraverso il comportamento
che esso ha rispetto al movimento sui tre assi, che hanno origine nel
Centro di Gravità della macchina. Nel nostro
caso, quello di un multicoptero o multirotore,
la questione diventa complessa senza l'ausilio di un sistema di stabilizzazione
dinamico, già abbondantemente descritto, poichè come vedremo,
i multirotori sono sia Dinamicamente che Staticamente
assolutamente instabili.
Il sistema di controllo del volo dinamico - l'autopilota - interviene sui motori singolarmente, poichè essi sono l'unico organo sia di spinta che di governo della macchina. L'autopilota interviene su ogni singolo motore, in maniera indipendente, diverse volte al secondo, variando il numero di giri (o l'angolo di attacco delle pale - per quei multicopteri molto più complessi di quelli che stiamo analizzando in questo sito) quindi aumentando o diminuendo la spinta su ogniuno indipendentemente.
L'autopilota
agisce molto velocemente grazie a due elementi importanti: un calcolatore
in grado di risolvere una serie complessa di algoritmi, che descrivono
il comportamento della macchina e quindi la relativa soluzione ed un
giroscopio interno che fornisce le informazioni spaziali relative all'assetto
della macchina, il tutto in perfetto accordo con il fine di mantenere
assetto e direzione stabili. Il giroscopio interno fornisce le informazioni
relative all'assetto al calcolatore; allo stesso modo di quanto il nostro
sistema vestibolare fa con il cervello, che in base alle informazioni
spaziali ricevute ne calcola posizione e assetto nello spazio, permettendoci
di mantenere l'equilibrio.
Un multicoptero funziona esattamente allo stesso modo. Qualsiasi animale
o uomo non è in grado di mantenere il proprio equilibrio senza
un apparato vestibolare (giroscopio) ed un cervello
(autopilota).
In un successivo capitolo vedremo come le varie dinamiche che avvengono su un multicoptero producono singolarmente una serie di forze in grado di garantire il volo, ma anche fonte di disturbo e di instabilità della macchina.
©Gino D'Ignazio Gizio