Struttura ed architettura di un Multirotore
La principale regola per la riuscita nella costruzione
di un ottimo multi-rotore è il compromesso tra la resistenza
strutturale e la leggerezza dell'intero telaio. Un tempo era molto difficile
riuscire a costruire un aeromobile che incontrasse nello stesso sistema
queste due importanti proprietà. Oggi grazie ai materiali ed
alla tecnologia più efficiente, si riesce a concepire una macchina
leggera e resistente al contempo con capacità e prestazioni inimmaginabili
fino a pochi anni fa, quando nel 1996 progettavo il
primo multi-rotore elettrico al mondo il CellCraft G150,
riuscire in questo intento era una impresa impossibile ed unicamente
confinata all'immaginazione.
Vi sono diverse possibilità e configurazioni accettabili per costruire un multi-rotore, alcune semplicissime e molto diffuse come la struttura ad X; la migliore dal punto di vista aerodinamico, poiché minore è il numero di rotori, minore è l'effetto delle turbolenze e dei problemi ad esse associati. Un altra possibilità è aumentare il numero di motori sempre di un numero pari, poiché la coppia che si genera durante la rotazione deve essere controllata da un eguale numero di motori opposti. Ad oggi si è arrivati a raggiungere il numero massimo di dieci motori, sebbene in relazione al massimo peso per applicazioni commerciali come videoriprese non si è andati oltre le otto unità, ed un numero di motori non inferiore ai due ma in questo caso la macchina funzionerà in maniera differente.
Il multi-coptero sperimentale E-Volo tuttavia fa eccezione in quanto a numero di motori applicati ad un multicoptero, esso è provvisto infatti di ben 18 motori Brushless a corrente continua, decisamente troppi per essere una macchina commercialmente affidabile, ma probabilmente più sicuro, poiché in caso di perdita di uno o più motori, i rimanenti dovrebbero compensare l'assetto comunque con l'aiuto del sistema di Stabilizzazione Dinamico, che come vedremo risolve la maggior parte dei problemi legati al volo dei multi-rotori.
Per
poter operare in sicurezza un multicoptero deve essere dotato di una
piattaforma centrale che deve contenere i sistemi di volo, le batterie
ed eventuali accessori legati al suo impiego, come per esempio un Gimbal
(stabilizzatore dinamico per telecamera). I componenti dovrebbero
possibilmente essere sistemati intorno all'area prossima al centro di
gravità (CG), questo punto del multirotore sarà
tuttavia esclusiva del sistema di controllo, che deve per forza maggiore
trovarsi in quella posizione.
Questi dispositivi hanno un peso relativo è sono piuttosto leggeri,
ma la piattaforma deve essere in grado di sostenere carichi come le
batterie ed i motori che sono gli elementi più pesanti, ma anche
le sollecitazioni prodotte dai rotori e le torsioni meccaniche, che
sono la conseguenza di questi movimenti che creano accellerazioni verticali
importanti. La struttura non deve piegarsi o essere debole alle varie
sollecitazioni meccaniche provocate dal volo. Essa deve essere dotata
di supporti sicuri per la sicurezza delle batterie che sono l'elemento
più pesante della macchina, tuttavia la maggior parte dei componenti
più leggeri - come l'unità di controllo e qualche
altro elemento elettronico - possono essere fissati sul piano della
struttura con biadesivo a spugna, sufficiente a mantenere la presa e
permettere la rimozione eventuale degli elementi in un secondo momento,
se necessario.
Cellula
In questa sezione è bene precisare che non mi riferirò a macchine pronte al volo, cioè già assemblate con struttura a guscio come per esempio la serie Phantom. Quello che tratto in questa sezione si riferisce all'architettura di una macchina da assemblare ed alle sua parti principali spiegandone la funzione.
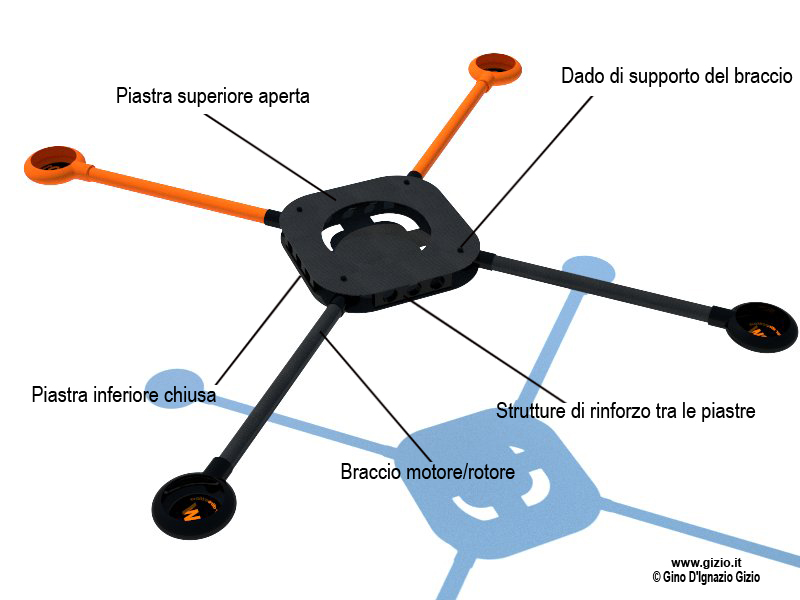
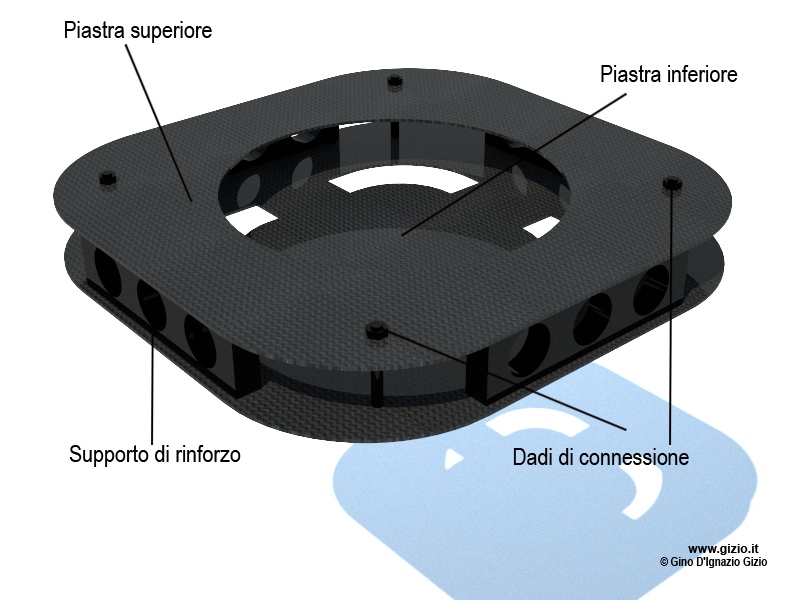
Il
corpo centrale o la cellula è solitamente costituita da due piastre
in carbonio o bachelite. Nel nostro esempio opteremo per il primo materiale
che si dimostra particolarmente leggero e resistente, perfetto per un
multi-coptero, tuttavia piuttosto costoso come i telai prodotto da XAircraft.
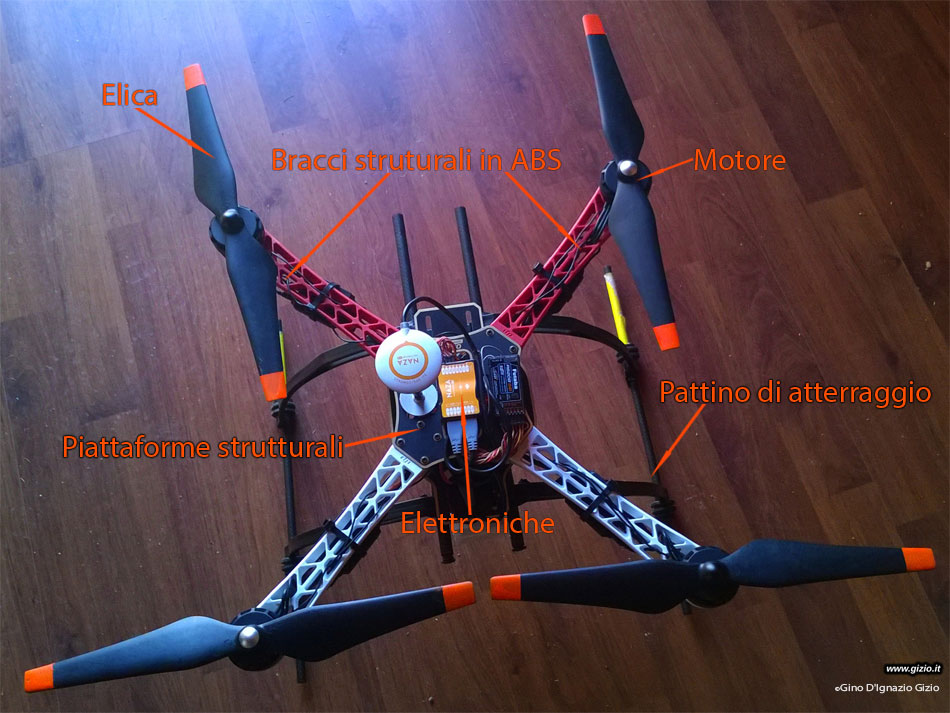
DIJ produce degli ottimi telai in ABS
e Polietilene, con piastre in bachelite, molto economici
e relativamente leggeri. Da ricercatore ho sperimentato entrambi i sistemi
ed ancora oggi i test vengono fatti su tre macchine diverse con struttura
in Carbonio e Polietilene, rispettivamente
due quad, uno in carbonio, uno in ABS
ed un exa in ABS; quest'ultimo ormai
abbandonato come soluzione ideale.
Dal corpo centrale si estendono tre o più braccia che supporteranno
i motori ed i rotori ad essi montati. La regola del controllo della
coppia vuole che i bracci che sostengono motore e rotore debbano essere
sempre in numero pari. Nel nostro caso analizzeremo due strutture tra
le più comuni, un quad, cioè con quattro braccia e quattro
rotori, ed un exa, cioè con sei braccia e sei rotori in fibra
di carbonio.
Piloni e bracci
I piloni di sostegno o braccia del multicoptero, possono essere ripiegabili o rigidi, questo fattore strutturale è tuttavia relativo nella scelta poichè è a seconda dell'impiego e sopratutto della capacità del pilota e delle sue aspettative che è legata la scelta della struttura portante. Tuttavia possiamo stabilire che un telaio in carbonio con braccia ripiegabili risulta comodo per il trasporto in un piccolo contenitore, ma è senza dubbio più delicato, poichè gli snodi di collegamento ai bracci di sostegno possono rompersi o deformarsi con il tempo. I bracci di sostegno rigidi non offrono una capacità di trasporto conveniente, tuttavia sono molto più robusti e difficili da danneggiare in caso di caduta accidentale o collisione causata da una manovra azzardata o da un evento esterno accidentale, come la collisione con un volatile, cosa che incredibile a dirsi a me è accaduta, purtroppo con la caduta della macchina e rottura di un motore ed un braccio e le conseguenze mortali per l'uccello purtroppo.
Il terminale di un braccio deve sostenere il motore che ha un peso notevole, se paragonato alla leggerezza dell'intera struttura, che oltretutto produce sollecitazioni dovute alla variazioni di accellerazioni angolari e verticali, con sollecitazioni continue del carico sull'intero braccio e sull'attacco o sugli snodi che connettono i bracci al corpo centrale.
Sul braccio viene fissata in genere anche l'unità ESC, che assicura l'alimentazione ad ogni motore, attraverso impulsi a frequenza, in tensione continua. L'unità ESC è connessa al motore ed attraverso un cavo di alimentazione alla batteria, ed un cavo tripolare all'unità centrale di controllo, che invia impulsi modulati in tempo reale agli ESC affinchè questi regolino mediante una frequenza variabile la tensione di alimentazione sul relativo motore ad induzione, in accordo con le correzioni di assetto che l'unità centrale di controllo dinamico effettua grazie al giroscopio interno, ma questo è argomento che approfondiremo nella sezione elettronica.
I bracci devono essere capaci di sopportare il peso dei motori e le sollecitazioni verticali ed orizzontali prodotte dalla coppia che i motori generano e che si scarica sulla struttura. Poichè i rotori sono i quattro o i sei punti di sostegno dell'intera struttura di un multicoptero, cioè i punti fisici di appoggio di tutto il peso del multicoptero, che contiene le batterie anch'esse pesanti, o il Gimbal per la telecamera, essi devono resistere alle sollecitazioni prodotte da improvvise accellerazioni verticali che generano torsioni importanti sugli attacchi, o peggio atterraggi bruschi (per piloti meno addentrati) che possono rompere i supporti o lo stesso braccio.

Pattino di atterraggio e sostegno batteria
E' un elemento a mio parere importante, poichè non serve solo a sostenere la macchina dal suo peso, ma è in grado di attuire l'impatto in caso di brusco atterraggio. Anche per il decollo si mostra utile, giacchè tiene lontano la struttura principale dal terreno, ma più di tutto da la possibilità di effettuare un decollo elicotteristico, portando cioè la macchina prima leggera sui pattini per poi effettuare il distacco. Se il pattino ha una struttura leggera ed elastica, piuttosto che rigida, esso fungirà anche da smorzatore delle vibrazioni al suolo, che in alcuni casi mettono in crisi il sistema giroscopico, poichè le vibrazioni prodotte dai motori - come quelle a bassa frequenza - possono per alcuni instanti sbilanciare il sistema, fino a quando la macchina ha guadagnato il volo, quando queste si riducono, quando si dissipano una volta in volo, questo fenomeno è chiamato risonanza e sarà argomento che verrà trattato in seguito.
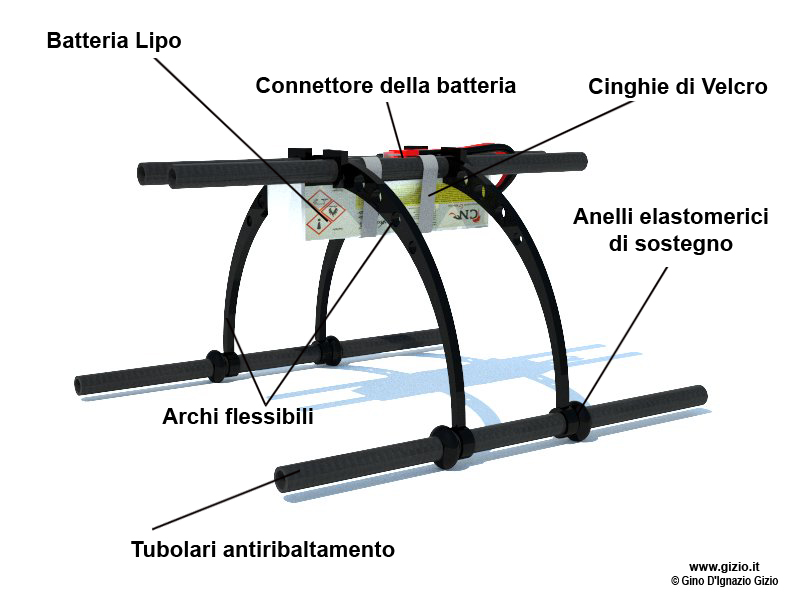
Ho visto spesso porre la batteria di lato, o sopra la piattaforma superiore della cellula, al di sopra del CG (Centro di Gravità), e trovo sconveniente quella posizione poichè in caso di movimento della batteria essa potrebbe scivolare urtando i rotori bloccandoli, ma anche perchè è più conveniente sistemare qualsiasi peso - in modo particolare data la massa della batteria - al di sotto del centro di gravità, montando dunque un apposito sostegno al di sotto della cellula o in qualche caso fissata al pattino di atterraggio. La batteria potrà essere assicurata con delle cinghie di velcro.

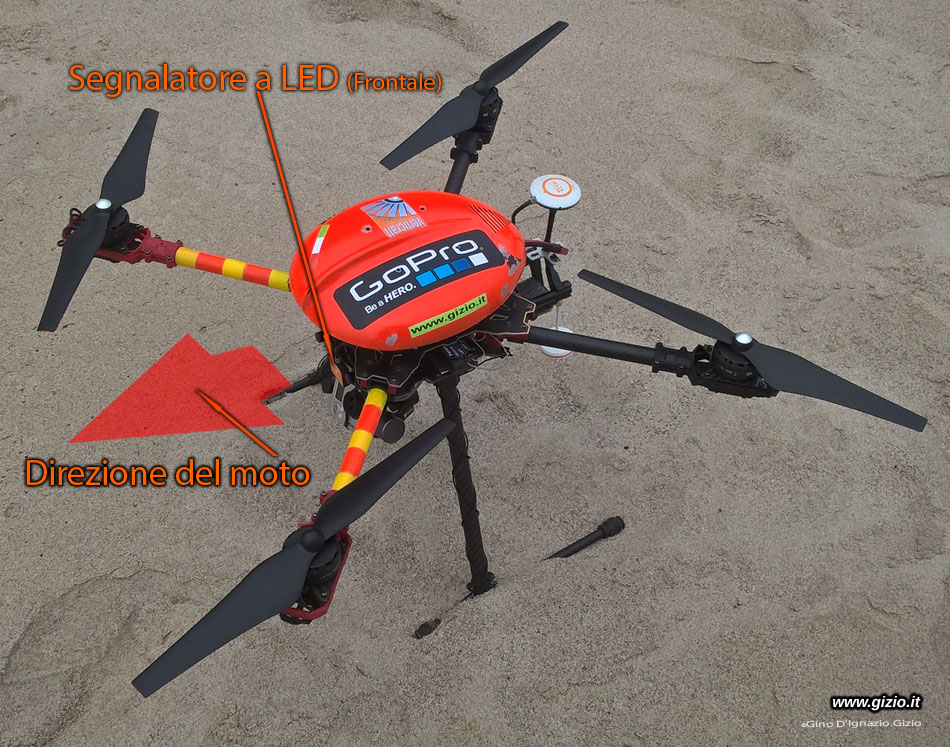
Colori e segnalazioni
E' molto importante l'aspetto ed i colori da assegnare ad un multicoptero poichè la sua architettura non ricorda un corpo che mostra un senso di direzione preciso, come può essere quello di un elicottero, che ha un muso ed una coda con stabilizzatori, per cui il pilota a terra è in grado di individuarne la sagoma e controllare con perfezione la direzione. Nel nostro caso la macchina ha una struttura simmetrica, per cui è importantissimo che in qualche modo si marchi la direzione di moto in avanti con dei colori. Una strategia vincente è quella di dipingere almeno due dei bracci anteriori, con un colore visibile e brillante come l'arancione, il rosso o il giallo, e sopratutto montare sulla parte anteriore un led di segnalazione di un colore come il rosso acceso in modo da individuare la parte anteriore della macchina quando questa è ad una certa distanza. In questo modo si potrà distinguere con chiarezza la direzione e l'orientamento della sagoma del multirotore, evitando di fare manovre errate o contraddittorie che possano ingannare il nostro senso di percezione della direzione di moto della macchina.