| Interface between man and machine The
project CellCraft -as I’d already wrote
in other pages of this site - began initially as an idea which
included the review of some architectural elements related
to the cockpit as well introducing new type of
flight controls. This included an accurate study for
the development of an integrated system which would be a perfect
interface between the pilot and the aircraft,
a system like that tough pretty much complex would be efficient
as well interactive and can guarantee a high level of safety particularly
in emergency situation. These
were the basic elements which initially I considered vital in
order to design a new environment, getting a system that would
be ideal for an efficient interaction between pilot and aircraft.
In the past years I worked as a helicopter pilot
flying on various rotorcraft nut spending most of my flight time
on Bell Jet-Ranger, as well getting a couple
of hundreds hours on airplane. I was already graduated as a industrial
designer at that time so my attention become even more attracted
by the aviation environment focusing most of my attention to that
extraordinary flight environment. |
 |
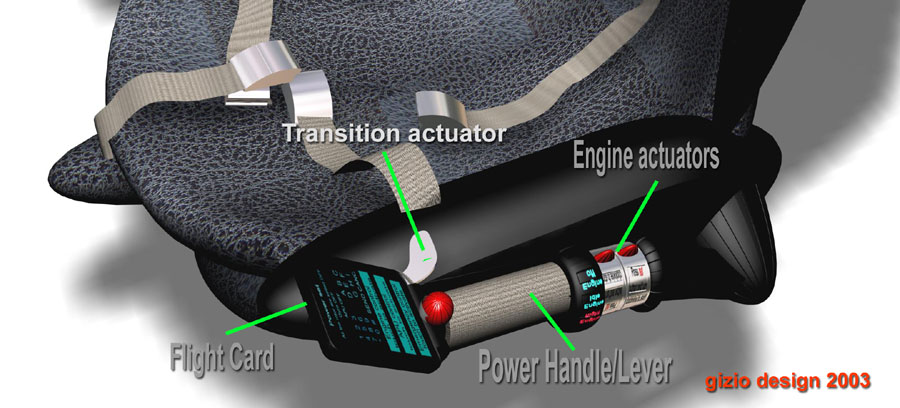
| Smart Chair The
SMARTH CHAIR represent
the beginning of the entire history of my projects and the consequence
of the subsequent development of the CellCraft.
This “device” is a little resemblance to what we consider
the classic pilot seat, however its architecture is indeed belonged
to its multitude functions that in this case change significantly
its original meaning. Inside
the
SMARTH CHAIR there
are accommodated some electronic important elements, as well the
sensors of the pneumatic pressure as described above. There are
three accelerometers, respectively for the measurement
of accelerations occurring on the three axis,
these parameter can be measured through the variation of the pilot
body weight (angular acceleration of the body). The
SMARTH CHAIR can
be installed or removed aboard the aircraft through a simple and
easy operation which takes just a bunch of minutes and one person
to replace it. Once
the aircraft is on the ground for technical checks it is possible
to diagnose the state of the machine through routine maintenance
connecting the diagnose computer to the AFC for
the electronic control and the related diagnoses. Some of the
technical check can be also made even while the aircraft is in
flight through a satellite remote system, from any location through
transmission data via GPS satellite system to
a central server on the ground. The architecture of the aircraft resemble ad idea in wich different group of elements according to a specific pattern, are interconnected with single cells, easily splitting in short time for maintenance proposes, thanks to a modular system and the high technologies available today - and perhaps tomorrow - flexible and perfectly integrated in a compact flying system called CellCraft. The next future will see new concepts that maybe could match or even represents projects like those on this site. The
SMARTH CHAIR is one of the vital cell of the
machine, a singular element. It combines a number of functions
and commands just placed around the pilot, pretty unusual if compare
it to a conventional aircraft where instead most of switches,
knobs and lights are pretty much spreader separately in space
and positions all around the cockpit. |
 |
| Tactile dispay and console The
idea behind the project was initially to review the cockpit itself,
particularly the arrangement of actuators, switches and all those
mechanical elements distributed around the pilot's seat, often
incorrectly, confused and un-ergonomic. I wished to fund a new
way to integrate all these devices into a compact system visible
and easily accessible, separating them by type and function. This
was one of the main goals that I wanted to achieve since the first
project: the DDRH.
The first attempt to design such a system was introduced before the CellCraft even appeared, and it was introduced on the DDRH (1995-96), a particular type of helicopter provided of ductedn electric propellers. It has just one single display that would projected everything pilot would need from navigational instrumentation, up to the of motors monitoring, in other words the screen would be able to reproducing a sort of virtual panel control, which contained lights and emergency alert, as well activation switches for the various vital functions. The DDRH was equipped with a joystick which acted electronically on the aircraft since it hasn't any cyclic control system, since the airfraft flew through two parallel electric ducted rotors. The concept for this type of helicopter resembled already in some aspects the future idea that came later in the form of the CellCraft. This strange helicopter in-fact represented an experimental basis for starting the new projects to come. The power control of the DDRH consist of a small lever placed on the left side of the seat. Both control levers including pedals were both activated through a fly-by-wire system that operated thanks to electric servo-actuators, through a simple electronic system that multiplied proportional displacement of the levers, within a millimeter scale movement of the axes of rotation of the rotors. All those devices are present today on all CellCraft models, DCL (Directional Control Lever) even tough pretty much technologically evolved. |
 |
In the G150’s project, all the information coming from the management system was concentrated in a single display, that worked also as main operative control device, it displayed as well all the main functions of the machine but the complexity of the project was a bit higher than of the DDRH, however both the projects opened the way to the CellCraft. In addition with this system there was also the introduction of vocal commands, that although limited in their operations, constituted a further interesting possibility, which was later developed further in subsequent projects, according with the evolution of both computer and software at that time that was very fast and impressive. This section is mainly dedicated to both projects, the CellCraft G450 and G455 equipped with a tactile display device made of three different units, one for the navigation and the other two for the flight parameters management and actuation devices; like virtual switches etc and GPS map navigation. Through
both displays pilot can recall several functions, moving icons or
even re-programming more complex ones in a certain position of the
screen as you like, changing the size of it etc; in few words you
can finally be able to customize the whole layout. All that digital
stuff will be stored in the Flight Card memory
and can be recalled to the next flight loading your preferred parameters. |
 |
Rotors
The
CellCraft is provided with eight three-phase
induction motors with permanent magnets electronically synchronized
through a digital device
RRC (Rotor Control Revolution)
which sends a continuous sequence of electrical
pulses coordinated with the position of the magnets of the rotor.
The pulse frequency is calculated by the control system with extreme
precision and it can guarantee a perfect synchronism. Each motor
can produce an average power of 50 kw for a total
available power of 400 kw. The motors are assembled
inside the rotor chamber in pairs of two and are connected through
an internal mechanical system. The
rotor mast that supports each rotor is placed across the longitudinal
axis of the relate side wing, it is a tubular structure through
which both the power cables of the two motors forming the rotor,
as well the optical cable designed to convey the necessary digital
information coming from the various sensors sends signals constantly
to the AFC located in the meddle of the fuselage
body. Smarth Chair allows all the operation as described above easy and safe for the comfort of the pilot and the passengers. |
|
| ©Gino D'Ignazio Gizio | |