Interfaccia Uomo-Macchina Il
progetto CellCraft nacque inizialmente come idea
che prevedeva la rivisitazione di alcuni elementi architettonici
che compongono il cockpit ed i comandi di volo di un aeromobile
tipo, questo includeva lo studio per lo sviluppo di un sistema
di interazione uomo-macchina efficace e soprattutto efficiente
che fosse interattivo e garantisse un elevato grado di sicurezza. Il primo passo fu quello di partire dall’elemento umano: dal pilota. Il punto di osservazione a me molto familiare parte dal sedile di comando, poiché esso - cosi come i comandi di volo - è il primo elemento di contato con il velivolo. Successivamente la mia attenzione si focalizzò sia sulla giusta qualità che sulla quantità delle informazioni necessarie alla conduzione del volo, stabilendone un grado di importanza e sopratutto di semplificazione della gestione dei parametri di volo incluso il manuale di volo digitale, insomma una gestione ottimale dell’insieme. Questi
furono gli elementi da cui inizialmente partivo per progettare
il primo ambiente ideale di interazione pilota-velivolo. In quegli
anni operavo già come pilota commerciale di elicotteri
oltre ad avere una formazione di designer industriale, che era
mia intenzione - grazie alle mie esperienze dirette -
indirizzare sempre più verso il settore aeronautico. |
 |
| Smart
Chair La SMARTH CHAIR è dunque l’inizio dell’intera storia e del conseguente sviluppo del CellCraft. Si tratta di qualcosa che somiglia poco a quello che noi consideriamo il classico sedile o posto a sedere di un aeromobile, sia per la sua architettura, sia per la sua funzione che in questo caso cambiano notevolmente.
Il sedile di comando è costruito su di un telaio di alluminio
ed alcuni elementi in acciaio leggero, ricoperti con una serie di
sacche pneumatiche che lo rendono leggero e particolarmente anatomico
oltre che confortevole in molteplici condizioni di stress da volo
prolungato. Un apposito sensore è in grado di calcolare le
variazioni di pressione del corpo del pilota sulla sua superficie
in modo da poterne definire il livello di accelerazioni subite,
interagendo con l’AFC che come vedremo più
in avanti avrà un ruolo importante anche rispetto a questo
elemento. All’interno
della SMARTH CHAIR
alloggiano alcuni elementi elettronici oltre che a sensori della
pressione pneumatica come sopra descritto, vi sono tre accelerometri
rispettivamente per la misurazione delle accelerazioni sia verticali
sia laterali che orizzontali che avvengono sulla poltrona costantemente
lungo tutta la fase del volo, oltre ai comandi di volo ed al sistema
elettronico di interpretazione e digitalizzazione delle informazioni
provenienti da essi; a loro volta provvisti di sistemi di comunicazione
come descritto nella sezione relativa. La
SMARTH CHAIR può
essere installata o rimossa a bordo della macchina attraverso una
operazione semplicissima che assorbe solo qualche minuto ed una
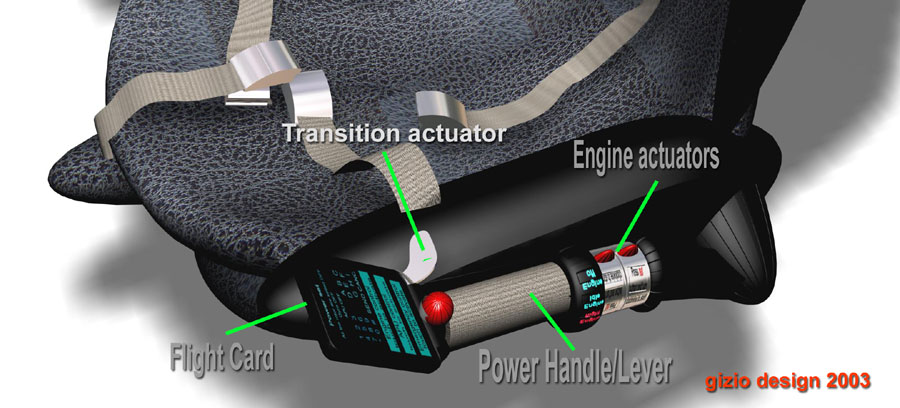
sola persona per compierla. Il
connettore ottico provvede alla trasmissione sia delle operazioni
di input che di output di tutte le informazioni digitali che si
muovono da e verso l’elemento, come le posizioni dei comandi,
gli interventi su di essi, le attivazioni o disattivazioni di funzioni
etc, cosi come per le informazioni che vengono pubblicate sui display
del comando direzionale e quelle che vengono registrate sulla FLIGHT
CARD. L’idea
di raggruppare elementi secondo un preciso schema di celle interconnesse
tra loro, ma separabili facilmente senza laboriose operazioni grazie
alle tecnologie di oggi sempre più elaborate ed integrate,
sarà in futuro il concetto di base che nel mio caso rappresenta
questo progetto. La SMARTH CHAIR
infatti è una cella della macchina, un elemento separato,
che racchiude in se una serie di funzioni che sono intorno al pilota
e che negli aeromobili convenzionali sono collocate separatamente
in spazi e posizioni diverse. |
|
|||
|
|||
|
|||
|
|||

 |
Rotori
Il
CellCraft G450/455 è
dotato di otto motori ad induzione trifase a magneti permanenti,
sincronizzati elettronicamente attraverso un dispositivo digitale
(Rotor Revolution Control) che utilizza una sequenza
continua e coordinata di impulsi elettrici sui magneti dei motori.
La frequenza di impulso viene calcolata dal sistema di controllo
con estrema precisione e sincronismo. Ognuno dei motori può
produrre una potenza pari a 50 kw. I motori sono
assemblati all’interno del vano rotore a coppie di due e
sono appositamente connessi attraverso un sistema meccanico interno. L’anello
che circonda il rotore, protegge le pale da urti esterni oltre
che a fungere da supporto aerodinamico per la struttura intubata
che come è noto riduce la resistenza indotta che si genera
alla periferia delle pale (Aerodinamica
Elicottero). L’albero
che sostiene ogni singolo rotore e che attraversa l’ala
relativaè in acciaio aeronautico. Si tratta di una struttura
tubolare, attraverso la quale passano sia i cavi di alimentazione
dei due motori accoppiati che formano il rotore, sia il cavo ottico
atto a trasportare le informazioni necessarie relative ai vari
sensori verso l’AFC. |