EJ110 (Electrojet) Verticraft
O EJ110 ElectroJet é uma aeronave compacta, muito pequeno e projetada de acordo com o mesmo princípio que, desde 1996 eu adotei em meu primeiro projeto de Cellcraft: o G150. Esta aeronave funcionou graças à combinação entre uma APU (Auxiliary Power Unit) e um quatro ou hélice mais motor elétrico. Eu defini este tipo de aeronave com o termo TLS (Transmission-Less-Aircraft), uma vez que os cabos substituem os eixos pesados e as caixas de engrenagens.
Essa máquina foi equipada com uma APU ou, neste caso um (Unidade de Alimentação Principal) MPU que fornece a energia necessária para o vôo na forma de energia elétrica, controlada e transmitida através de uma unidade lógica complexa de oito motores elétricos que forneceram a sustentação em vôo de toda a aeronave. Embora a série Cellcraft e DDRH concebido mais tarde, são substancialmente idênticos em princípio de funcionamento, sendo assim a aeronaves tipo TLS, bem como a série EJ, este último tipo de aeronave, contudo, não tem titulação de rotores, os rotores são de facto fixados rigidamente à fuselagem.

EJ110
O EJ110 é o menor projeto desse tipo para o qual
eu trabalhei, é em verdade, o ponto de partida para uma série
de quatro novas aeronaves que serão baseados na mesma tecnologia
TLA; testado hoje apenas em aeronaves menores conhecidos
como drones ou multicópteros. Por cerca de dois anos, tenho experiência
em meu pequeno quadcoptero e de muitas horas de vôo, a fim de explorar
a perspectiva potencial desta tecnologia, que, através de uma máquina
em uma escala maior pode abrir horizontes interessantes, sendo assim renovando-se
a indústria da aviação tecnologicamente .
Estrutura de Aeronaves
O EJ110 é construído na maioria das partes
do corpo em carbono e materiais compósitos, ou mesmo a partir de
processos de reciclagem. A principal estrutura é montada de nervuras
e solicitações feitos em ambos os casos em fibra de carbono,
que são unidas em conjunto por meio de uma cola apropriada. A estrutura
de apoio será acompanhado de duas seções laterais
de alumínio reciclado para o quadro em fibra carbono, que nos permite
ter um tão compacto, leve e durável corpo.
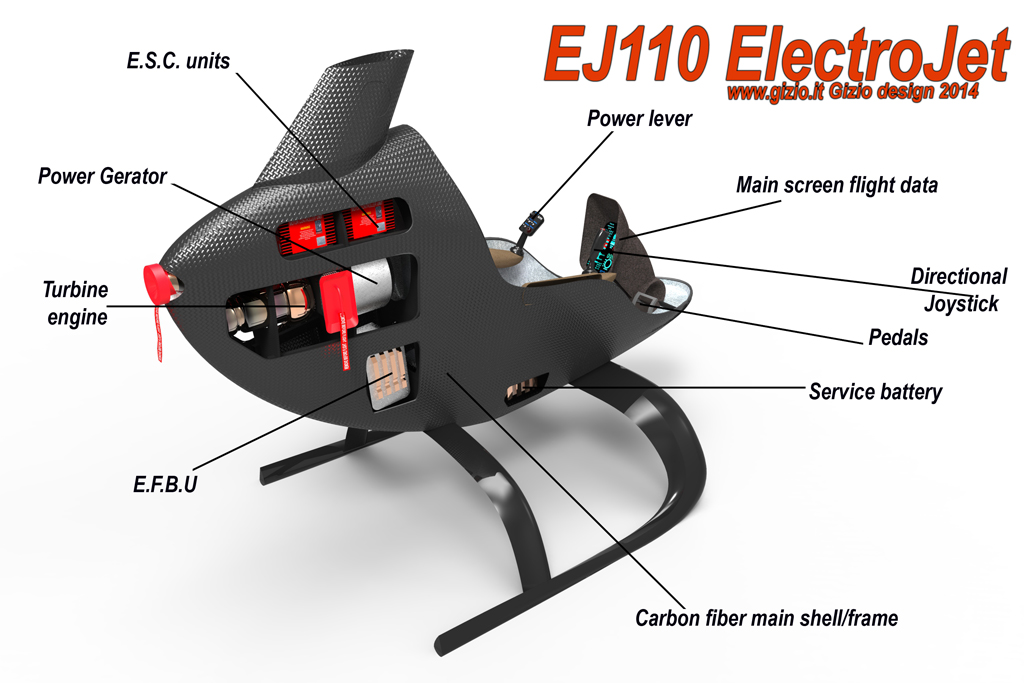
Dentro do escudo não está abrigando todos os elementos vitais
que fazem o avião voar com eficiência. O componente mais
importante é a principal unidade de potência: MPU
(Unidade de Alimentação Principal), que consiste
de um motor de turbina pequena ligada a um alternador, capaz de fornecer
uma potência de 160 Hp de saída, servindo
para fornecer eletricidade para os motores principais (rotores).
A casca também contém uma bateria de serviço, que
se alimenta exclusivamente no computador principal de voo, bem como as
unidades AFC e os sistemas de navegação
necessárias.
O reservatório pode conter mais de 200 litros de biocombustível e é colocado abaixo do centro de gravidade da aeronave, um e o peso a bordo de aeronaves tipo multicópteros pode ser facilmente deslocado de uma vasta gama de opções, ao longo do centro de gravidade. Quad-helicópteros são em verdade bastante flexíveis sobre balanceamento de carga.
A fuselagem está ligada através de um gancho mecânico dedicado a um feixe de suporte, que contém os quatro rotores principais, que são alimentados por oito motores eléctricos. Os motores são tipo indução e controlado eletronicamente. As unidades de controle de motores estão alojadas no espaço superior da fuselagem, ao lado da conexão da-asa rotor. A ala conectora está equipada com um rolamento elastomérico que amortece as oscilações, formando vibrações tanto laterais e frontais, a fim de reduzir ou absorver as tensões, devido ao desembarque ou quaisquer manobras em voo, o que poderia afetar mecanicamente toda a estrutura.
Os suportes dos quatro motores são dobráveis e pode girar os dois pares de rotores de até 110 graus, este mecanismo permite o acesso fácil para o processo de manutenção da máquina, assim permitindo que ele seja recuperado em espaço pequeno.

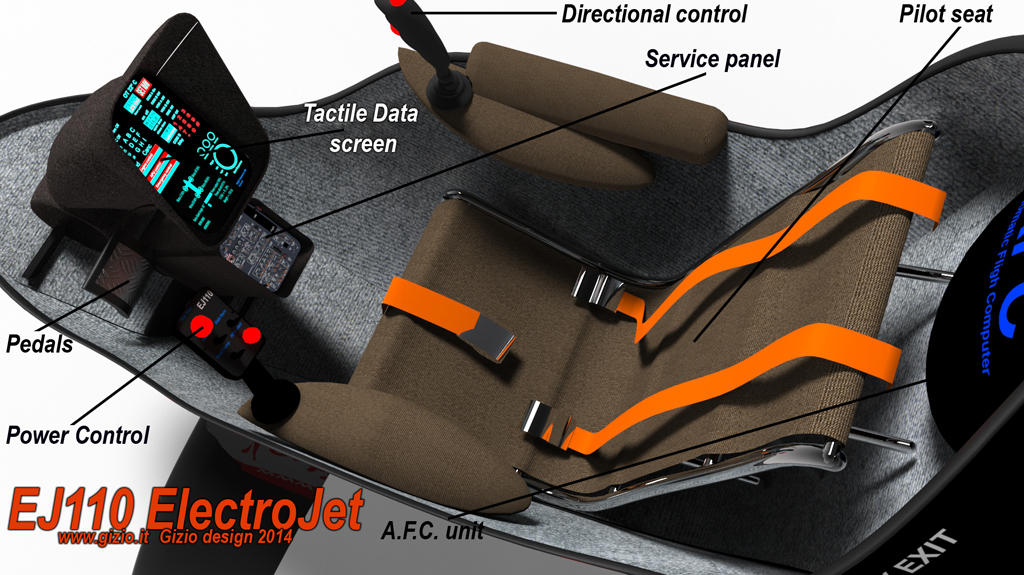
Cabine do Piloto
O cockpit é coberto com folhas de absorção do som,
e contém um painel de serviço e um display touch-screen
programável, que fornece todas as informações de
vôo, seja através de ativação manual ou por
comandos vocal pré-programados. O ângulo da tela é
projetada para garantir ao piloto um grande visibilidade externa, permitindo
ao piloto a digitalização fácil na a tela principal,
bem com a visualização para fora da aeronave. A tela tem
um filtro de alto contraste, que permite fácil leitura das informações,
mesmo com uma forte fonte de luz direta.
Os sistemas de controle da EJ110 são basicamente
dois. À esquerda, há uma alavanca de controle de potência,
que modifica o potência em vôo, inclinando para a frente
ou para trás a atuação de alavanca sobre os moto-propulsores.
Enquanto torcendo a alavanca na direção desejada piloto
vai controlar as guinadas.
Este dispositivo simples substitui os pedais que ainda estão
presentes em aeronaves comuns, como helicópteros. O controle
de potência é fornecido em um botão para a ativação
do vôo automático (AF).
No lado direito existe a alavanca para o controle longitudinal e lateral,
é um dispositivo muito semelhante a um joystick que se inclinada
na direção desejada permitirá o piloto controlar
a atitude da aeronave, da mesma forma que acontece que atualmente em
relação ao comando cíclico de um helicóptero
comum. O controle direcional é proporcionado com uma tecla na
parte superior da alavanca. Se ativado manualmente ele vai começar
a seqüência de vôo de emergência através
do EFBU (Unidade de Bateria Prara Voos de Emergência).
Ambos os controles são do tipo fly-by-wire e agem diretamente
sobre o AFC.
O
Acesso à cabine do piloto é possível através
da rotação de uma cúpula de Plexiglas montada sobre
uma estrutura de alumínio. Embora o acesso não seja muito
confortável nessa aeronave específica, por haver um certo
sacrifício para a acessibilidade, por razões de design,
é, no entanto, ampla e confortável para o piloto, uma
vez que esteja sentado em seu interior. É importante notar que
o método de projeto que eu adoto é sempre feita em 1:
1. dimensionar usando um manequim virtual desenhado em minhas
medidas físicas, de um indivíduo de 1,76 cm
de altura e 80 quilos de peso, que representa o tamanho
médio do de um piloto.
Unidade
MPU
É
um motor de turbina axial, ligado a um gerador capaz de fornecer até
208 Kw (280Hp) de potência máxima contínua.
Ambos os componentes são muito leves, concebido de forma a substituir
os componentes de metais pesados com materiais alternativos, tais como
o Teflon, carbono e alumínio, etc. O gerador, é feito
a partir de duas meias conchas de carbono que protegem ambos os magnetos
e o rotor, o do rotor é montado sobre um veio de carbono, em
vez das de aço clássicas. Os componentes restantes são
os únicos elementos feitos em metal, porque algumas partes não
podem ser substituíveis de acordo com a sua específicação.
Uma vez que o motor da turbina funcione à uma velocidade média
de 16000 (RPM), o gerador foi concebido de modo a ser
capaz de suportar tal velocidade de fiação, isto é,
de fato, diretamente ligado ao motor de turbina, não existem
caixas de engrenagens de redução desnecessárias
ou de qualquer outro tipo, e isto simplifica o trabalho de montagem
e manutenção, além disso reduzindo o peso e o espaço
disponível, tornando a unidade de alimentação compacta
e eficiente. O gerador possui um duplo ventilador automático
de refrigerado a ar. Não existem circuitos de lubrificação
ou de arrefecimento líquido, uma vez que os rolamentos do gerador
são de tipo cerâmico em vez de ser de metal, dando uma
maior resistência mecânica e menor peso. O motor de turbina
é pequeno e compacto, controlado pelo AFC que controla também
os motores elétricos em vôo. O CAF, de
facto, atua também sobre o motor de turbina através do
ajuste da energia requerida pelo piloto, mantendo ao mesmo tempo a velocidade
ligeiramente superior, a fim de agir rapidamente de acordo com a variação
de potência que pode mudar em qualquer momento durante o voo.
Este sistema é uma fórmula de economia de combustível
muito alta, e o seu conceito foi concebido também para reduzir
o trabalho dramaticamente na MPU, aumentando a sua vida.

Hoje, graças ao progresso tecnológico ainda se movendo para a frente, com dispositivos eletrônicos integrados e muito sofisticados, a perfeição é possível e com algumas centenas de euros qualquer pessoa pode construir um robô perfeito como eu fiz, capaz de voar corretamente, executando manobras que, em alguns casos mesmo o melhor helicóptero não é capaz de fazer.
Finalmente chegou o momento, nós podemos projetar e construir uma máquina em uma escala maior com base nos mesmos mecanismos que tornam menores drones quad-helicóptero voando eficentemente. Um quad-helicóptero é capaz de levantar um peso discreto se comparado com o seu projeto estrutural. Os quatro motores eléctricos que, tipicamente, um quad-helicóptero está equipado, são controlados por um sistema dinâmico de cálculo, o que mantém a rotação das hélices independentes, variando a potência fornecida em cada motor individual em tempo real, mantendo, assim, a aeronave perfeitamente horizontal . Isso é possível graças à combinação de sofisticadas unidade de computador, software dedicado e dispositivos tais como acelerômetros e pequenos giroscópios e inclusive mais precisos. O software é projetado para garantir o máximo de segurança e conforto do vôo, sem perder o prazer de pilotar a aeronave. Existem vários controles de vôo automáticos bem uma unidade de GPS instalado na aeronave de trabalho de acordo com a unidade de AFC.
Piloto pode programar o vôo para chegar ao destino desejado ou voar do ponto A ao ponto B, ou através de combinações de qualquer outra rota mais ou menos complexo, para alcançar um determinado lugar sem a necessidade de qualquer intervenção nos controles, em breve poderá voar completamente automaticamente. A máquina também pode manter uma posição em um ponto fixo pairando sobe o ar, com extrema precisão, uma vez que o GPS integrado funciona de acordo com o AFC em uma sincronização perfeita. A máquina também é capaz de decolar e pousar automaticamente, quase em qualquer superfície sem qualquer ação manual por parte do piloto.

Rotores
Sistema de rotor foi muito simplificado neste projeto se comparado aos
projetos anteriores. Sua estrutura inclui quatro rotores, cada um deles
dirigido por dois motores elétricos, três fases controladas
digitalmente por uma unidades ESC via AFC.
Os motores eléctricos são muito planos e muito leves,
e são intermutáveis e interligados, montado sobre um anel
de suporte sustentado por três suportes de aço que contêm
três cabos para cada motor.
A cabeça de cada motor está equipada de um sistema de
rotor de cinco pás feitas de carbono, as lâminas são
independentes e são rigidamente ligadas ao disco principal que
as apóia. O rotor inteiro é protegido com um anel, que
também fabricado em fibra de carbono, protege o disco do rotor,
e destina-se também a melhorar a aerodinâmica e eficiência
do rotor, reduzindo radicalmente o arrasto induzido formando na ponta
da lâmina como vórtices indesejados. O anel também
é projetado de tal forma, uma vez que ele unico é aerodinamicamente
eficiente, tendo um perfil de corrente de ar, permitindo que o ar flua
corretamente sobre o lado da frente do disco, como efeito da matéria
para obter uma velocidade considerável em vôo, que seria
maior do que chegar por um helicóptero convencional.
Neste últimos anos eu fiz com os meus drones muitos voos de teste,
a perfeição deste desta aeronave provou que um quadcóptero
consegue chegar a uma alta velocidade consideravelmente.De fato cheguei
a uma velocidade máxima de 107 quilômetros
por hora em vôo para a frente em cerca de vinte metros do nível
do mar, com uma temperatura de 24°C, com um pequeno
quad-helicóptero. É uma aeronave muito pequena mas aparentemente
mais eficiente, em alguns aspectos, que um helicóptero convencional,
e é de facto capaz de superar o problema de assimetria de elevação
que é uma limitação muito complexas para a aeronave
de rotor único, tal como helicópteros, que são
bastante limitados em determinadas velocidades devido a este efeito
que ocorre entre o avançar e o recuar da lâmina.
Os quatro rotores são montados sobre um suporte inclinável,
estão ligeiramente para cima com um diedro positivo de cerca
de 10 graus. Eles podem, no entanto, ser inclinados
para baixo, até um ângulo máximo de 110°
para permitir a fácil manutenção sobre os rotores,
bem como o armazenamento fácil de toda a aeronave em espaços
reduzidos.

Segurança
O sistema de controle de vôo é projetado para garantir o
máximo de segurança. O sistema funciona como uma espécie
de salvaguarda para proteger a integridade do piloto e da máquina
também. Dentro das cadeias do software existe uma parte substancial
de instruções que reproduzem um tipo de instinto de sobrevivência
da máquina. A aeronave intervem para corrigir qualquer manobra
acidental realizada acidentalmente pelo piloto e mantem sempre o vôo
seguindo em uma faixa de segurança.
O EJ110, bem como todas as TLAs ou Verticrafts
que eu projetei no passado, é composto de um sistema de segurança
muito eficiente, que é ativado automaticamente em caso de emergência;
a EFBU (Unidade de Bateria Para Voos de Emergência)
que é ativada em caso do motor de turbina já não
fornecer a energia necessária para o voo, ou em que a energia seja
reduzida devido a uma avaria inesperada, ou em caso de perda da unidade
MPU.
O EJ110 tem uma bateria de íon de lítio
multicelular que poderia garantir a energia necessária para os
motores durante o vôo não sendo superior a dez minutos de
vôo, o que seria suficiente para fazer a manobra de pouso seguro
sem ser forçado para o piloto.
O dispositivo pode ser ativado manualmente, no entanto, por padrão,
ele é acionado automaticamente em caso de falha do motor, ou de
uma perda de potência. A ativação do sistema vai ser
demonstrada por meio de sinais de áudio, como aelerta claramente
visível no ecrã do visor principal, sobre a qual aparece
um contra-relógio especial que irá indicar o estado da energia
disponível a partir da bateria e o tempo de voo permitido pela
unidade de emergência EFBU (Unidade de Bateria Para Voos
de Emergência). Nesta circunstância a aeronave após
o pouso de emergência não pode continuar o seu voo, uma vez
que o estado de carga da bateria seria alterado e não esteja completamente
eficiente. No entanto, pode ser recarregada ou substituída em alguns
minutos, se necessário. A unidade EFBU foi concebida
apenas para alimentar os motores eléctricos e unidades CES
sozinho em caso de emergência, substituindo a perda de potência
da unidade MPU, que não está integrada
no sistema e á AFC aviónica, os quais são
em vez disso alimentados a partir da bateria de serviço de forma
independente.