The
EJ110 ElectroJet is a compact aircraft, very small and
designed according to the same principle that since 1996
I adopted on my first Cellcraft's
project: the G150.
This aircraft worked thanks to the combination between an APU
(Auxiliary Power Unit) and four or more eletctric propeller.
I defined this type of aircraft with the term TLS (Transmission-Less-Aircraft),
since cables replace heavy shafts and gear boxes.
That machine was equipped with an APUs or in this case
a MPU (Main Powe Unit) that provided the required
power for the flight in the form of electricity, controlled and conveyed
through a complex logic unit, to eight electric motors that provided the
sustaining in flight of the entire aircraft. Although the series Cellcraft
and DDRH
designed later, are substantially identical in the working principle,
being as well TLS aircrafts type as well as the EJ
series, this last type of aircraft however has not titlting rotors
of any type, since its rotors are indeed rigidly fixed to the fuselage.

The EJ110 is the smallest project of this kind to which I have worked, it is in-fact the starting point for a series of four new aircraft that will be based on the same TLA technology; tested today only on smaller aircraft known as drones or multicopters. For about two years I have experienced with my little quadcopter many flight's hours, in order to explore the potential perspective of this technology, which, through a machine on a larger scale could open up interesting horizons, both teconological as well renewing the aviation industry itself.
Aircraft Structure
The EJ110 is built in most of the body parts in carbon
and composite materials, or even from recycling processes. The main frame
is assembled of ribs and ordered in both cases made by carbon fiber, which
are joined together through an appropriate adhesive. The supporting structure
will be joined to two side sections made as well made by carbon fiber
to the inner carbonium frame, that gives to the aircraft a super compact,
light and durable body.
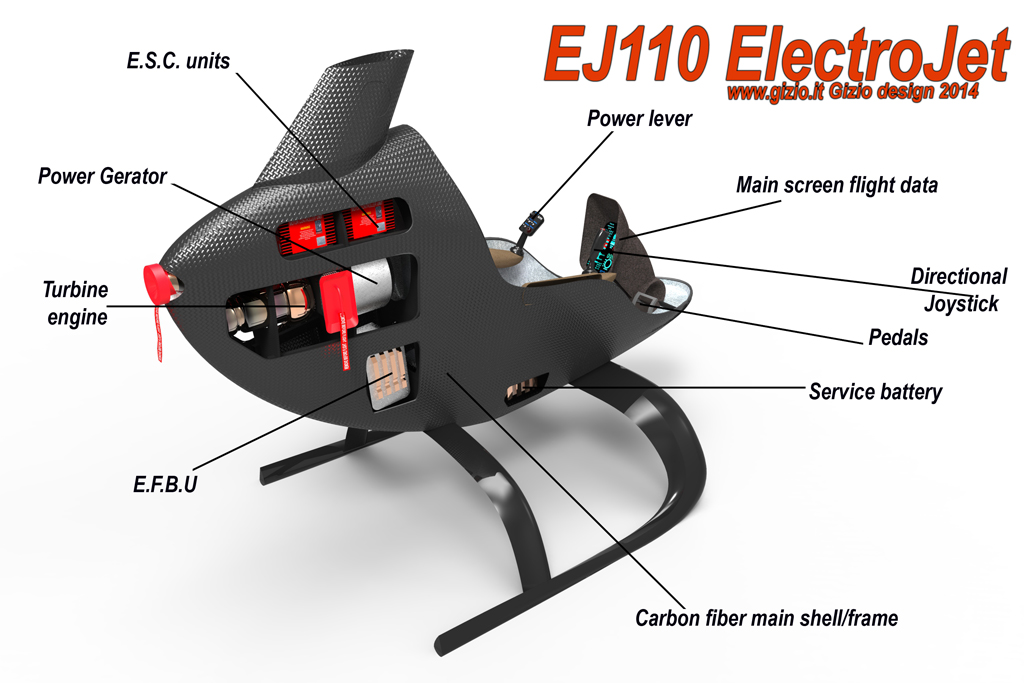
Inside the shell there are housing all the vital elements that make the
aircraft flying efficiently. The most important component is the main
power unit: MPU (Main Power Unit) consisting
of a small turbine engine connected to an alternator, capable of providing
an output power of 160 Hp serving to supply electricity
to the main motors(rotors) . The shell also contains a service battery,
which feeds exclusively on the main flight computer, the AFC
units as well power the required navigation systems.
The tank can contain more than 200 liters of biofuel and is placed below the center of gravity of the aircraft, since the weight aboard multicopters aircraft can be easily shifted in a wide range, along the center of gravity. Quad-rotors are in-fact quite flexible about load balancing.
The fuselage is connected through a dedicated mechanical hook to a beam support, that contains the four main rotors, which are powered by eight electric motors. Motors are induction type and electronically controlled. The motors control units are housed in the upper space of the fuselage, next to the the rotor-wing connection. The connector wing is equipped with an elastomeric bearing that dampens the oscillations, forming vibrations both lateral and longitudina axes , in order to reduce or absorb the stresses, due to landings or any in-flight maneuvers, which could mechanically stressing the whole structure.
The pylons of the four engines are foldable and can rotate the two pairs of rotors down to 110 degrees, this mechanism allows easy access for the maintenance process of the machine, as well allowing it to be recovered in small space.

Cockpit
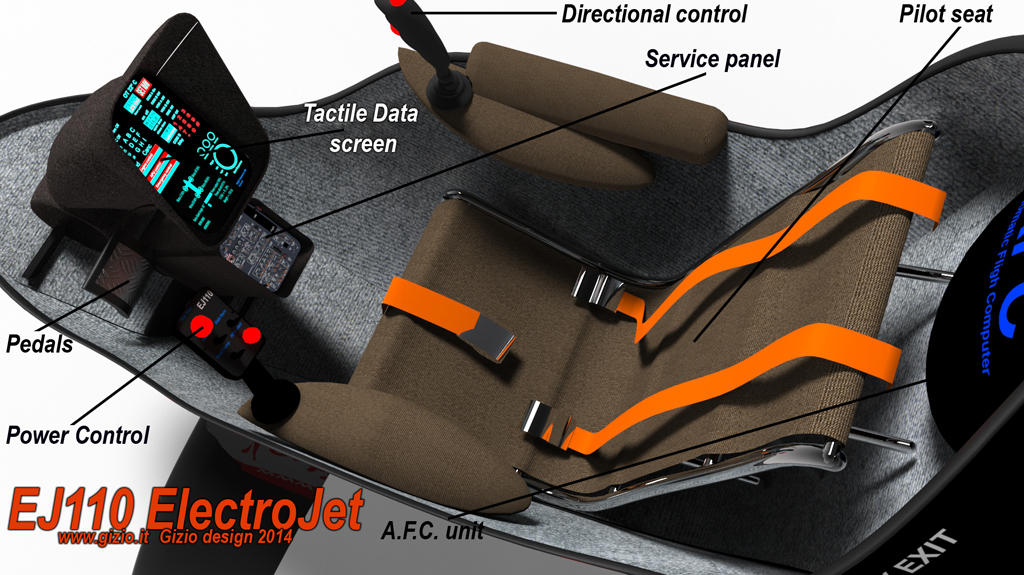
The cockpit is covered with sound-absorbing foils, it contains a service
panel and a programmable touch-screen display, which provides all the
flight information, either through manual activation or by pre-programmed
vocal commands. The angle of the screen is designed to guarantee to
the pilot a large external visibility, allowing the pilot easy scanning
to the main screen as well outside the aircraft. The screen has a high-contrast
filter, which allows easy reading the informations even with a strong
direct light source.
The control systems of the EJ110 are basically two.
To the left there is the Power control lever, which
modify the power in flight by tilting forwards or backwards the lever
acting on the motor-propellers. While twisting the handle in the desired
direction pilot will control the yaw.
This simple device replaces the pedals that are still present in ordinary
aircrafts like helicopters for the yaw control. The power control is
provided of a button for the activation of the automatic flight (AF).
On the right side there is the lever for the longitudinal and lateral
control, it is a device very similar to a joystick that if tilted in
the desired direction allow pilot to control the attitude of the aircraft,
as it happens acting on the cyclic command of a common helicopter. The
directional control is provided with a key on the top of the lever.
If manually activates it will start the sequence for the emergency flight
through the EFBU (Emegency battery Flight Unit) unit.
Both controls are fly-by-wire type and act directly
on the AFC computer.
The access to the cockpit is possible through the rotation of a Plexiglas dome, mounted on an aluminum frame. Although access is not very comfortable on this specific aircraft sacrificing accessibility for design reasons, it is, however, ample and comfortable for the pilot once seated in. It 'important to note that the design method that I adopt is always made on 1:1 scale size, using a virtual mannequin drawn on my physical measurements, of an individual of 1.76 cm in height and 80 kilos weight, that represents the medium size of the a pilot.
MPU unit
It
is a axial turbine engine, connected to a generator capable of delivering
up to 208 Kw (280Hp) maximum continous power. Both
components are very light, designed so as to replace the heavy metal
components with alternative materials, such as Teflon,
Carbon and Aluminum etc. The generator,
is made from two half-shells of carbonium that protect both the magnets
and the rotor, the rotor is mounted on a carbonium shaft instead of
the classic steel ones. The remains components are the only elements
made in metal, because some parts can't be replaceable according to
their specific duty.
Since the turbine engine runs at the average speed of 16000
(RPM) the generator is designed so as to be able to support
such spinning speed, it is in fact directly connected to the turbine
engine, there are no unnecessary reduction boxes or gears of any type,
and this simplifies the work of assembly and maintenance, furthermore
reducing the weight and the space available, making the power unit compact
and efficient. The generator is air-cooled by an automatic couple of
fans. There aren't liquid lubrication or cooling circuits, since the
generator bearings are ceramic type, instead of being of metal, giving
a higher mechanical strength and lower weight. The turbine engine is
small and compact, controlled by the AFC which manage
as well the electric motors in flight. The AFC in fact
acts also on the turbine engine by adjusting the required power by the
pilot, while maintaining the speed slightly higher, in order to act
quickly according to the power variation that may change at any time
during the flight. This system is a very high fuel savings formula,
the concept was conceived also to drammatically reduce the work on the
MPU by increasing its life.

Unlike
its predecessors, the EJ110 has been greatly improved
by the electronic point of view, if compared to the preceeding projects
of mine. The components are much smaller and less complex than those conceived
in the past. If you think that at the time of the first projects of my
TLA's aircraft type, in 1996, the chances of imaging
a similar machine for me was pretty much like a science fiction's idea.
Computers were very heavy and slow, and there were no electric motors
or powerfull processor such as those available today, or small accelerometers,
gyroscopes of such accuracy as are available today. Right now we can image
a stabilization system perfectly integrated into the main calculation's
unit, which contains a multiprocessor, two gyroscopic units and a series
of accelerometers, all fundamental elements for the computation in order
to get a perfect stabilization of the aircraft in flight.
Today, thanks to the technological progress still moving forward, with
very sophisticated electronic and integrated devices, the perfection is
possible and with a few hundred euro anyone can build a perfect drone
like I did, able to fly properly, performing maneuvers that in some cases
even the best helicopter is not able to
do.
Finally
the time has come, we can design and build a machine on a larger scale
based on the same mechanisms that make smaller quad-copter drones flying
efficently. A quad-copter is able to lift a discrete
weight if compared to its structural design. The four electric motors
which typically a quad-copter is equipped with, are controlled by a dynamic
system of calculation, which keeps the rotation of the propellers independent,
varying the power delivered on each individual motor in real time, thus
maintaining the aircraft perfectly horizontal. This is possible thanks
to the combination of sophisticated computer units, dedicated software
and devices such as accelerometers; gyroscopes and small proves and sensors
evem more precise then ever. The
software is designed to guarantee maximum safety and comfort of the flight,
without losing the pleasure of piloting the aircraft. There are several
automatic flight controls as well a GPS unit installed
on the aircraft working according with the AFC unit.
Pilot can programming the flight to get at the desired destination or
flying from point A to point B, or through any other less or more complex
route's combinations, to achieve a certain place without the need for
any intervention on the controls, in brief flying completely automatically.
The machine can also maintain a position at a fixed point in hovering,
with extreme precision, since the integrated GPS works
according with the AFC in perfect synchronization. The
machine is also able to take off and land automatically, almost on any
surface without any manual action by the pilot.

Rotor
system has been greatly simplified on this project if compared to previous
aircrafts. Its structure include four rotors, each one of them driven
by two electric motors, three-phases digitally controlled by a ESC
units via AFC. The electric motors are very
flat and very light, they are interchangeable and interconnected, mounted
on a support ring sustained by three steel pylons that contain three cables
for each motor.
On the head of each motor there is fitted a five-bladed rotor system made
of carbonium, the blades are independent and are rigidly attached to the
main disk supporting five of them. The entire rotor is protected with
a ring, also made by carbonium that protects the rotor disk, intended
also to improve aerodynamic and efficiency of the rotor, reducing radically
the induced
drag forming at the blade's tip as undesidered vortex.
The ring is also designed in such way, since it is itself aerodynamically
efficient, having an airstream profile allowing air to flow correctly
over the disk front side, as matter effect to get a considerable speed
in flight, which would be greater than that reaching by a conventional
helicopter.
In this past years I made with my drone many test flights, the perfection of this aricraft proved that a quad-copter can quite reach a considerable high speed. In-fact I reached a top speed of 107 km per hour in forward flight at about twenty meters from the sea level, having a temperature of 24° C with a small quad-copter having a take off-off maximum weight of 2,57 kg. It is a very small aircraft but apparently more efficient for some aspect, than a conventional helicopter, it is indeed able to overcome the problem of dissymetry of lift that is a very complex limitations for single rotor aircraft such as that of a helicopter, which is rather limited at certain speeds due to this effect occuring between the advancing and the retreating blade.
The four rotors are mounted on a tilting support, it is slightly upward with a positive dihedral of about 10 degrees. They can, however, be tilted downwards up to a maximum angle of 110° to allow easy maintenance on the rotors, as well easy storage of the whole aircraft in small space.

Safety
The flight control system is designed to guarantee the maximum security, the system works as a sort of safeguard to protect the integrity of the pilot and of the machine as well. Inside the strings of the software there is a substantial part of instructions that reproduce a kind of survival instinct of the machine. The aircraft intervene to corrects any accidental maneuver performed accidentally by the pilot, mantaining always the flight withing the safety range.
The
EJ110 as well as all the TLAs or Verticrafts
I designed in the past, is provided of a very efficient security system
that is automatically activated in case of emergency, the EFBU
(Emegency Flight battery Unit) in case the turbine engine would
no longer providing the required power for the flight, or it is reduced
due to an unexpected malfunction, or in case of loss of the MPU
unit.
The EJ110 has a multicell battery Lithium Ion
battery that could guarantee the necessary power to the motors
for the flight not exceeding ten minutes flight time, which will be
sufficient to make a safe landing maneuver without stressing for pilot.
The device can be manually activated, however, by default it is triggered
automatically in the event of engine failure, or of a loss of the power.
The activation of the system will be showed by means of audio signals,
as visul advice clearly visible on the screen of the main display, on
which appear a special counter-clock that will indicate the state of
power available from the battery and the flight time left by the emergency
unit EFBU (Emegency battery Flight Unit). In this circumstance
the aircraft after the emergency landind can not continue its flight,
since the state of charging of the battery would be altereted and not
completely effecient. However it may be recharged or replaced in a few
minutes if necessary. The EFBU unit is designed only
to feed the electric motors and ESCs units alone in
case of emergency, replacing the unit MPU's power loss,
it is not integrated in the AFC system and avionics,
which are instead fed from the service battery independently.