In questa sezione: Stabilità Statica; Stabilità Dinamica; Sistemi di Stabilizazione; Stabilizzatore Bell; Stabilizzatore Hiller; Stabilizzatore Lockeed
Stabilità statica
Le qualità tipiche di un aeromobile - e nel nostro caso di un elicottero - possono essere definite attraverso tre componenti fondamentali, rispettivamente: STABILITA’, MANOVRABILITA’ e MANEGEVOLEZZA.
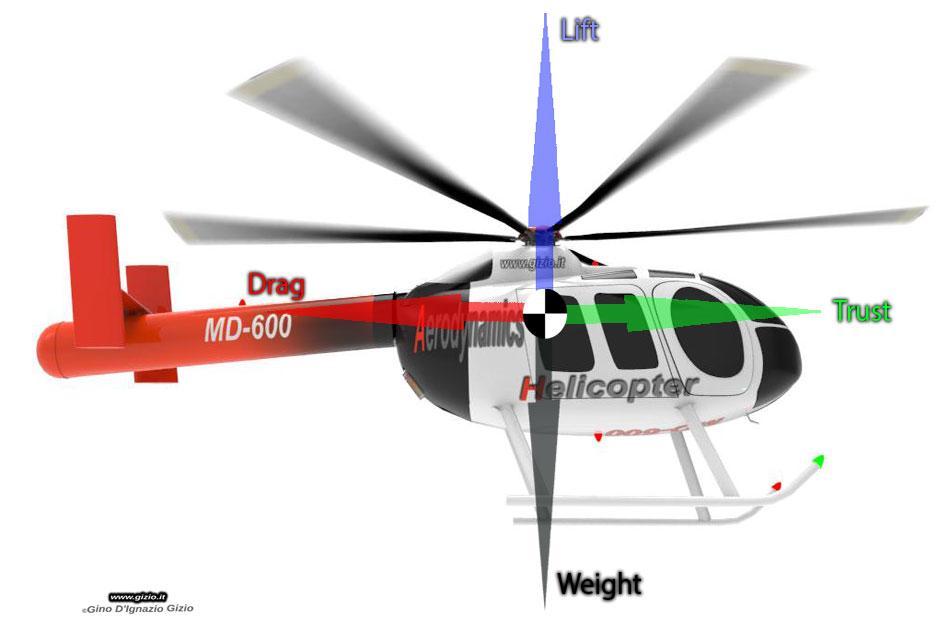
Un elicottero si definisce in stato di equilibrio quando la somma dei vettori di tutte le forze coinvolte nel volo, sono uguali a zero e dunque non c'è accellerazione in alcuna direzione; in altre parole quando la macchina è perfettamente livellata - in volo stazionario o volo rettilineo - ben trimmata ed in assetto. Se questo equilibrio viene disturbato un aeromobile stabile dovrebbe ritornare nella sua posizione originale precedente all'interferenza. Il termine "trimmato" si riferisce al fatto che il pilota dovrebbe essere in grado di volare senza le mani sul ciclico o senza effettuare particolari correzioni durante il volo. Dunque la somma delle differenze tra Peso/Portanza e di Spinta/Resistenza è uguale a zero.
L/W+D/T=0 (L=Lift;W=Weight;D=Drag;T=Thrust)



Gli elicotteri odierni sono STATICAMENTE STABILI a comandi BLOCCATI. Con questo si intende cioè quella condizione nella quale il pilota mantiene il comando del CICLICO in una posizione fissa, possibilmente bel trimmato al centro, senza esercitare alcuna pressione se non quella di trattenere la leva o applicare piccolissime correzioni provocate dall'effetto suolo durante il volo in hovering.
Gli elicotteri per loro natura sono in buona sostanza STATICAMENTE INSTABILI ed ancora più instabili lo sono i Multirotori. Se il pilota non esercitasse alcuna forma di bloccaggio verso il CICLICO, ma piuttosto lasciasse la leva libera nella sua posizione senza impugnarla, l'aeromobile comincerebbe a danzare lentamente in una sorta di valzer aereo, come nell'animazione in basso. La stabilità statica di un elicottero è sempre influenzata da ciò che avviene sul rotore, specie in termini di angolo di attacco delle pale, e poichè il disco rotore si comporta come un giroscopio, il flusso che viene dal di sotto del rotore in forma di turbolenze rende il sistema instabile creando tendenzialmente un movimento di beccheggio verso l'alto del muso della macchina.
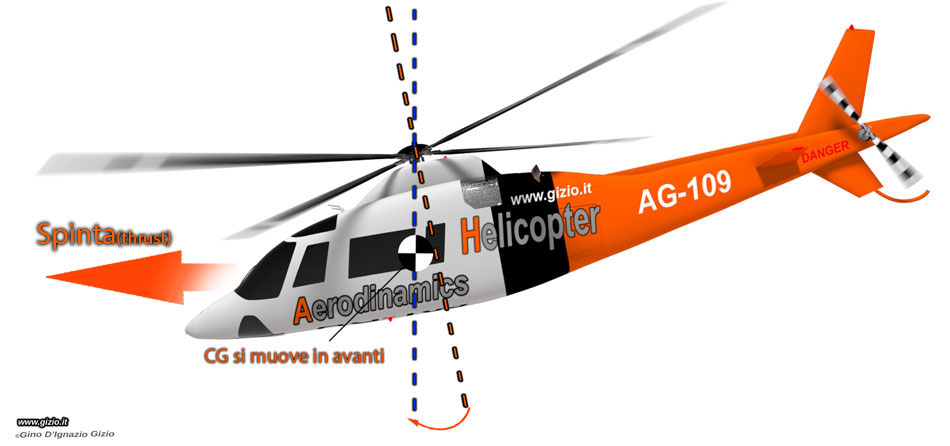
Durante il volo traslato però le cose cambiano, poichè il centro di gravità si sposta in avanti rispetto alla sua posizione originale. Infatti tanto maggiore è la velocità della macchina, altrettanto è lo spostamento in avanti del CG, tuttavia la dissimetria di portanza - che vede la pala avanzante incrementare la portanza su di essa - produce per effetto della precessione giroscopica un flappeggio ritardato di 90° sulla zona anteriore del rotore, con la tendenza di creare un beccheggio verso l'alto dell'elicottero (flap-back). Poichè la posizione del Centro di Gravità è estrememente influente sul corretto assetto dell'elicottero, si preferisce uno spostamento leggermente in avanti di esso, perchè favorisce la stabilità statica in modo considerevole. Questo però mantiene l'elicottero durante tutto il volo in una posizione leggermente picchiata ed è per questo che in alcune macchine come l'AW139, oppure il Sikorsky UH60, il mast del rotore è naturalmente inclinato in avanti, in modo tale che ad alte velocità l'elicottero abbia un assetto più orizzontale naturale. Questo però rende l'elicottero cabrato in hovering, ma evidentemente il gioco vale la candela per i progettisti di Agusta-Westland e Sikorsky.
Per migliorare questa condizione sono stati impiegati sin dagli inizi della storia di questo aeromobile delle superfici aerodinamiche come gli stabilizzatori orizzontali, che però diventano efficienti solo a determinate velocità, in genere intorno ai 65kts. Questi però rappresentano un problema in volo stazionario, poichè offrono una notevole resistenza al flusso del rotore e per questo vengono progettati con particolare attenzione, in modo da ottenere un utile compromesso. In alcuni casi gli stabilizzatori sono controllati da un sistema automatico come avviene sul UH-60, o quello più complesso montato sul K-MAX, in cui l'enorme stabilizzatore posto in coda viene regolato automaticamente a seconda della velocità dell'aeromobile.
In volo traslato l'elicottero viene influenzato anche dal comportamento aerodinamico del rotore anticoppia, perchè esso viene investito dal flusso indotto del rotore principale che non è più verticale, ma ha un andamento inclinato all'indietro investendolo costantemente lungo tutto il corso del volo.
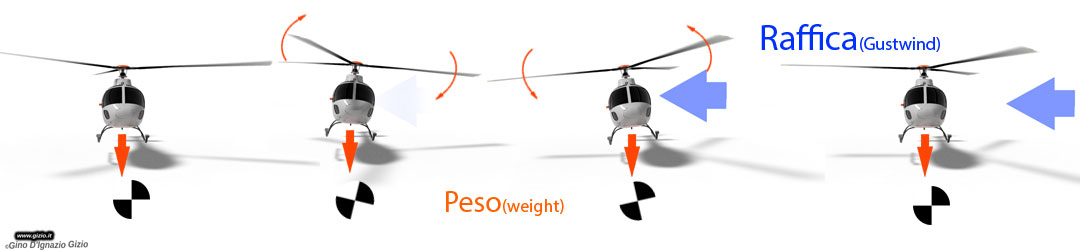
In generale si può dire che un elicottero è sempre progettato affinchè questo fenomeno sia ridotto al minimo e si impiegano degli stabilizzatori verticali per migliorare questa condizione, che debbano essere efficienti sopratutto in volo traslato. Tuttavia una raffica laterale potrebbe causare una rotazione o un spostamento sul lato spingente del rotore. L'effetto bandiera (Weather cook) ma lo stabilizzatore orizzontale in genere rimette sempre le cose a posto, permettendo all'elicottero di riguadagnare la sua stabilità originale.

Il periodo attraverso il quale il moto pendolare tipico di questa condizione di instabilità si ripete varia tra i 14 ed i 20 secondi e la sua variazione nel tempo dipende strettamente dal diametro del rotore della macchina. Un rotore più ampio infatti produce una oscillazione più lunga nel tempo, viceversa un piccolo rotore risulta molto più instabile, oltre ad essere di per se maggiormente suscettibile a condizioni di perturbazione esterna.
Spesso le tipiche condizioni di instabilità DINAMICA sono provocate da una cattiva conduzione del mezzo con spostamenti improvvisi e troppo ampi, sia del CICLICO che del COLLETTIVO, che esasperano la condizione originale dell’elicottero in volo. Situazioni di instabilità DINAMICA sono inoltre particolarmente evidenti in effetto suolo, poiché come si è già visto le perturbazioni riflesse dalla superficie in riverbero verso il flusso del rotore, provocano turbolenze continue con andamento casuale ed una costante presenza di vibrazioni caratteristiche.
Stabilità dinamica
E' la proprietà di un aeromobile nella quale esso possegga l'abilità di ritornare alla sua posizione originale, prima che la forza perturbatrice agisca sulla sua aerodinamica. L'elicottero è in buona sostanza governato dalla sua massa e dalla sua inerzia, che sono delle caratteristiche intrinseche di questa macchina. Ogni macchina ha parametri diversi dalle altre. In altre parole se le oscillazioni sono bene assorbite dal sistema che costituisce l'elicottero esse avranno una minore ampiezza, riducendosi nel tempo fino a scomparire in qualche secondo. Se invece l'ampiezza delle oscillazioni aumenta, l'elicottero potrebbe trovarsi sicuramente in una condizione di instabilità dinamica, come ad esempio avviene in caso di risonanza, tipico fenomeno che colpisce in modo particolare elicotteri dotati di rotore articolato come questo Schweizer 300 che finisce distrutto proprio in funzione del fenomeno della risonanza.
Dunque
la stabilità Dinamica definisce il comportamento
della macchina, laddove cessata la causa perturbatrice che ne ha cambiato
il comportamento iniziale, dopo un numero decrescente in ampiezza ed oscillazioni,
esso si riporterà in una posizione di assetto identica a quella
originaria; In questo caso l’elicottero risulterà DINAMICAMENTE
STABILE.
Viceversa se l’elicottero si allontana sempre più dalla posizione
o dalla traiettoria iniziale con oscillazioni aventi un'ampiezza sempre
più crescente, esso verrà definito DINAMICAMENTE
INSTABILE.
Infine, se l’elicottero non smetterà di oscillare mantenendo
comunque sia il grado di oscillazione, sia l’ampiezza costante verrà
definito DINAMICAMENTE INDIFFERENTE.
Anche in questo caso si pone una distinzione precisa se questo avviene
a comandi BLOCCATI o viceversa LIBERI.
Solitamente le macchine odierne sono in buona parte DINAMICAMENTE
INSTABILI a comandi liberi e richiedono un costante intervento
del pilota; fatta eccezione per quegli elicotteri che sono dotati di sistema
di stabilizzazione dinamico, poiché in quel caso il mantenimento
della stabilità dinamica della macchina viene garantito da un sistema
elettronico mediante l’impiego di un dispositivo giroscopico appositamente
progettato, come avviene su alcune macchine dotate di AFCS (Automatic
Flight Control System) oppure in alcuni radiomodelli e nei multirotori,
provvisti di un sistema di controllo elettronico della stabilità.
Gli elicotteri sono dotati di diversi tipi di rotori ed il controllo di assetto della macchina attraverso il comando ciclico risulta differente tra i sistemi adottati, infatti a secondo della loro architettura essi assorbono una parte delle turbolenze in maniera più o meno efficace, tuttavia poichè i tempi di reazione dovuti a fattori di instabilità dinamica sono lunghi, dell'ordine tra20 e 60 secondi. Il pilotà è in grado di correggere l'assetto con largo anticipo.
Stabilità e controllabilità sono fattori opposti tra loro, in altre parole essi sono rispettivamente i lati opposti della stessa medaglia, per cui se l'una aumenta, l'altra diminuisce. In breve la stabilità Statica ha effetti immediati sul comportamento della macchina, mentre quella Dinamica mostra i suoi effetti successivamente, in un arco di tempo più ampio.
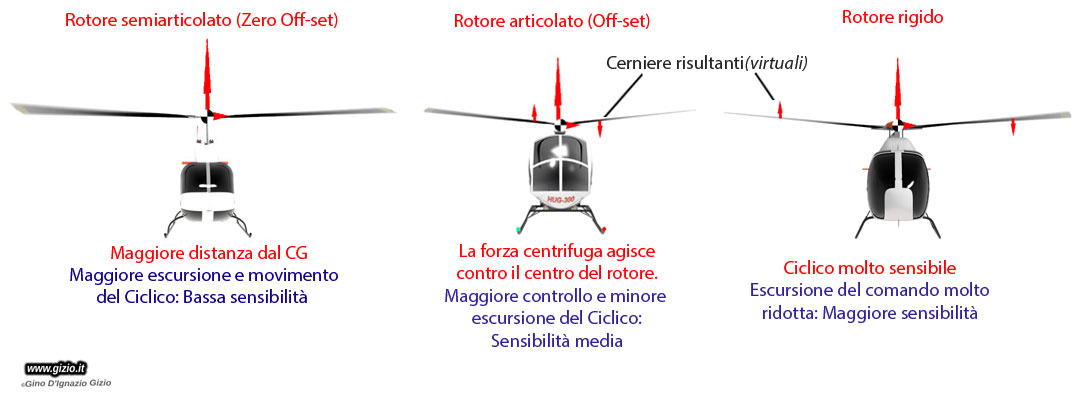
Il controllo della stabilità varia in modo molto diverso sui rotori degli elicotteri che sono in buona sostanza di tre tipi come vedremo. Nel rotore Bell o Robinson, con singola cerniera al centro del mast, il controllo del ciclico è molto più ampio ed il pilota è più impegnato in IGE (Hovering in effetto suolo) per poter mantenere il corretto assetto dell'elicottero in volo.
Nei rotori articolati le cose sembrano migliorare e si generano delle cerniere virtuali che si formano ad una certa distanza dal mast, permettendo al pilota di ridurre l'escursione dei movimenti del Ciclico per garantire assetto corretto in IGE (In Ground Effect).
Infine nel rotore rigido le cerniere virtuali risultano molto più lontane dal centro del mast ed il controllo del comando ciclico risulta molto sensibile, infatti bastano piccole correzioni per mantenere l'assetto corretto in IGE.
Stabilità direzionale
La Stabilità Statica Direzionale coinvolge il controllo dell'imbardata che avviene intorno all'asse verticale (Z). In hovering l'elicottero non possiede una stabilità direzionale, può muoversi in qualsiasi direzione. Il contributo maggiore invece in volo traslato è fornito dagli stabilizzatori verticali. La stabilita statica direzionale è governata da tre fattori principali: Il Momento aerodinamico sulla fusoliera, che inluenza la stabilità statica longitudinale; le forze laterali che agiscono sullo stabilizatore di coda verticale, che assicurano una stabilità direzionale in volo traslato e sono solitamente inclinate con un piccolo angolo in modo da mantenere il tronco di coda allineato al flusso d'aria che investe la pinna, in perfetto accordo con la spinta continua che produce il rotore anticoppia. Infine la Spinta prodotta dal rotore di coda che cambia con il movimento traslatorio laterale.
Una raffica sul rotore di coda riduce per qualche secondo la spinta che esso produce costantemente, provocando una rotazione del muso della macchina in direzione opposta, che dopo qualche oscillazione riporterà l'elicottero in perfetto assetto longitudinale.
Sistemi di stabilizzazione
Inizieremo qui una serie di analisi illustrando i sistemi più impiegati di stabilizzazione del rotore che migliorano le caratteristiche di stabilita DINAMICA pur tuttavia non risolvendo il problema completamente, poiché la conduzione dell’elicottero include necessariamente un controllo costante sui comandi. Alcune tipologie di elicotteri contemporanei come l’Agusta 139 sono dotati di sistemi di STABILIZAZIONE DINAMICA ATTIVA, e cioè di un dispositivo in grado di mantenere quota, assetto e direzione costanti soprattutto in volo stazionario. Questo tipo di velivolo è infatti ampiamente utilizzato per il soccorso aereo e marittimo, ed un dispositivo del genere aiuta il pilota a condurre operazioni a volte molto impegnative come quelle di soccorso aereo.
Uno dei problemi più evidenti del pilotaggio di un elicottero si riscontra durante il volo in effetto suolo. Iniziamo con l'evidenziare la differenza che esiste tra la pressione al di sopra del rotore che è minore rispetto a quella al di sotto di esso. Il flusso accelerato al di sotto del rotore genera turbolenze che subito dopo ritornano verso l’alto scontrandosi con aria nuova proveniente costantemente dal rotore stesso. Questo conflitto aerodinamico rende l’elicottero estremamente instabile ed apparentemente difficile da controllare. Igor Sikorsky, il più grande degli inventori e sviluppatori del moderno elicottero, filmava molti dei suoi voli di prova riguardandoli successivamente per analizzare il comportamento della macchina in volo. Ma si accorse sin da subito che i movimenti che egli faceva sul controllo ciclico erano eccessivi ed ampi (video). All'inizio per poter convincere i militari della semplicità di controllo della macchina faceva in modo che le proiezioni avvenissero leggermente rallentate in relazione alla velocità originale dei fotogrammi. Più tardi però risolse il problema attraverso la messa a punto di un sistema di ciclico più efficiente ed un dispositivo di controllo di questo più preciso, riducendo notevolmente i movimenti necessari sul comando.
Il realtà il controllo della macchina in volo stazionario in effetto suolo sembra inizialmente molto difficile ed uno studente pilota spesso può esagerare nella gestione del ciclico, compiendo movimenti estremi che portano rapidamente la macchina ad una condizione di instabilità totale. Ci sono tra l’altro differenze tra un elicottero ed un altro. Solitamente gli elicotteri bipala sono più "ballerini" di altri, e questo perché le pale si trovano all’interno di un ciclo che le porta alternativamente in una posizione longitudinale e poi trasversale, con conseguente variazioni di spinta istantanea, perchè la fusoliera come abbiamo visto, offre una resistenza aerodinamica che influenza il flusso proveniente dall'alto; dal rotore, che scorre lungo la parte superiore della macchina verso il basso (resistenza di forma). Ricordo molto bene i primi voli per il passaggio macchina sul Bell Jetranger III nei quali sin dall'inizio mi trovavo particolarmente impegnato nel mantenere la macchina perfettamente in assetto ed a punto fisso rispetto ad un punto di riferimento esterno, era una sfida che in quale ora di volo riuscii a vincere con successo.
Questo
fenomeno avviene in maniera molto minore negli elicotteri tri-pala, quadri-pala
etc. Questo tipo di rotore infatti pone sempre almeno due o più
pale in buona parte al di fuori del campo aerodinamico della fusoliera,
riducendo il momento alternato di queste, che avviene sulla fusoliera.
Ulteriori fattori di instabilità di volo in effetto suolo, sono
il diametro del rotore che è inversamente proporzionale alla grandezza
del fenomeno, in altre parole minore è il diametro del disco rotore,
maggiore è il livello di instabilità in effetto suolo.
Il peso e le dimensioni della macchina concorrono ulteriormente alla stabilità
in volo stazionario, cosi come il fondo e la natura del terreno al di
sotto di essa, che influenza notevolmente la qualità delle turbolenze
che aumentano all’aumentare delle asperità a terra.
E’ importante durante il volo stazionario mantenere il controllo della stabilità attraverso movimenti limitati del controllo ciclico che dovrà anticipare in buona sostanza di qualche secondo la tendenza dell’elicottero. Uno dei miei istruttori, il vecchio comandante Antonio Orsini, usava dire in modo molto colorato, che il controllo dell’aeromobile avviene attraverso la percezione delle parti inferiori del bacino, ed aveva ragione, poiché la posizione del bacino per l’appunto si avvicina molto alla zona in prossimità del centro di gravità della macchina e questo risulta infatti il punto di maggiore sensibilità e percezione relativo ai movimenti di assetto.
Stabilizatore Bell
Sin dagli inizi ci si è rivolti con estrema attenzione alla ricerca di una soluzione ottimale al problema della stabilità del rotore. Arthur Young (video) , ingengnere della Bell Helicopter, fu il primo a mettere a punto uno stabilizzatore efficace, cominciando già a sperimentare questo dispositivo su di un modello di elicottero elettrico sin dal 1930 con notevole successo. Il dispositivo prende il nome proprio dalla casa costruttrice e viene chiamato STABILIZZATORE A BARRA BELL (Bell Stabilizing Bar).

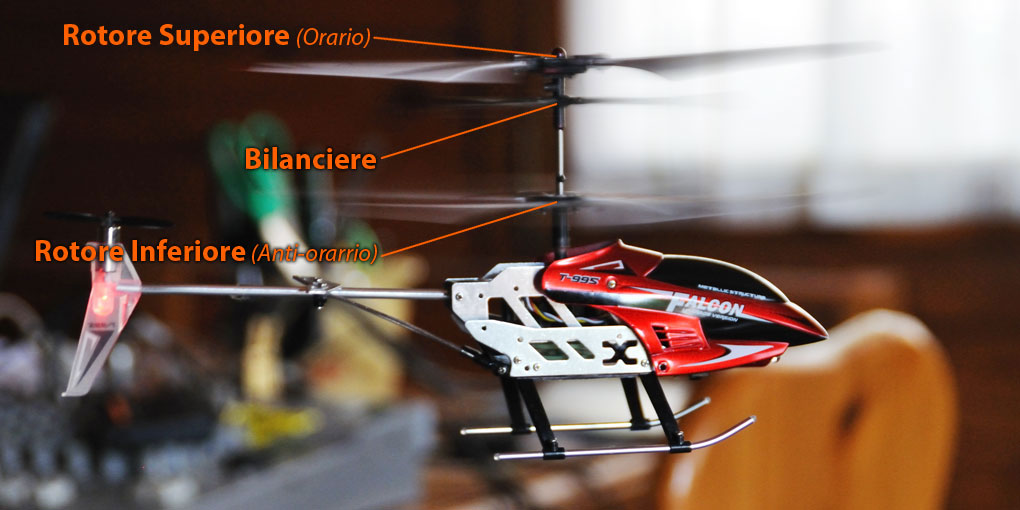


La barra stabilizzatrice Bell si comporta come un giroscopio che tende in questo caso a mantenere la sua posizione sempre sul piano orizzontale, indipendentemente dalla inclinazione del disco rotore. Se si osserva il volo di un piccolo elicottero radio-controllato, di quelli provvisti di rotore assiale controrotante, con piatto oscillante, si può notare come alla variazione dell'angolo sul orizzonte del rotore inferiore, il rotore superiore vincolato da uno stabilizzatore Bell si inclini inizialmente sullo stesso piano di quello inferiore, per ritornare immediatamente sul piano orizzontale subito dopo, proprio come farebbe un giroscopio. La barra nel caso di un elicottero monorotore Bell è direttamente collegata al piatto oscillante che è influenzata dal comando ciclico. La barra interviene a sua volta sulla variazione del passo delle pale ciclicamente correggendone l’angolo a seconda della perturbazione che il rotore riceve durante la rotazione. Inizialmente la barra non era dotata di sistema di smorzamento e sebbene durante il volo risultava molto stabile era ancora un po' difficile da gestire in volo, per questo fu adottato un sistema di smorzatori che ne migliorarono notevolmente il controllo, mantenendo il livello di stabilità giroscopica in modo eccellente.
La barra Bell contiene dei piccoli pesi (masse) alle estremità, che in quanto masse rotanti fa in modo che lo stabilizzatore si comporti come un giroscopio, regolando a sua volta l'angolo delle pale, cosicchè il disco rotore che si forma mantenga il suo piano di rotazione sul piano orizzontale. La barra inoltre interviene sulle pale con un angolo di 90°, per effetto della precessione giroscopica, ed infatti in un rotore bipala; questo sistema si dimostra eccellente e molto versatile.
Stabilizatore Hiller
Successivamente allo stabilizzatore BELL fu introdotto il tipo Hiller, composto da una barra dotata all’estremità di due profili aerodinamici tronchi. Questo tipo di stabilizzatore utilizza il flusso aerodinamico per lo stesso scopo per cui la barra Bell utilizza le proprietà giroscopiche grazie ai due pesi posti all'estremità. Anche in questo caso lo stabilizzatore Hiller era collegato direttamente al comando ciclico che influenzava l'angolo d'attacco dei due piccoli profili aerodinamici posti all'estremità di una barra al di sopra del rotore, questa a sua volta influenzava e variava il passo delle pale compensando gli eventuali squilibri aerodinamici. Successivamente furono aggiunti dei piccoli pesi alle estremità ed il dispositivo risultò talmente efficiente che l’elicottero poteva mantenersi in volo stabile per alcuni secondi senza l’intervento del pilota sui comandi. In occasione di una esposizione, un elicottero Hiller fu pilotato da una segretaria che riuscì a mantenere in volo l’elicottero senza difficoltà dopo solo qualche ora di addestramento, a dimostrazione che il sistema era perfettamente efficiente. Il sistema Hiller ha tuttavia uno svantaggio e cioè una leggera latenza in risposta rispetto al sistema Bell che invece risulta più immediato.
Anche in questo caso si ha un ampio utilizzo di questo sistema spesso montato su aeromodelli radiocomandati in scala, poiché si dimostra particolarmente stabile in volo stazionario, ma anche perché grazie al leggero ritardo di azione rispetto allo stabilizzatore Bell - cosa molto utile per piloti di radiomodelli - permette loro di agire nel giusto tempo sui comandi evitando manovre troppo brusche e pericolose per l’incolumità del piccolo elicottero in scala.
Il sistema Hiller si è dimostrato come la risposta vincente per questo tipo di elicotteri. Vorrei sottolineare che i piccoli elicotteri radiocontrollati sono esattamente una copia dei loro parenti in scala maggiore, si comportano nello stesso modo e sono soggetti alle stesse identiche leggi della fisica qui descritte. Come pilota di entrambe le tipologie prendo molto seriamente la rappresentazione in scala di un elicottero, poiché questi piccoli gioielli stanno come un gatto ad una tigre, e cioè entrambi felini di taglia diversa ma aventi gli stessi identici comportamenti, quindi entrambi elicotteri, di taglia diversa, ma aventi gli stessi identici comportamenti.


Stabilizatore Lockeed
Un altro interessante dispositivo di stabilizzazione messo a punto agli inizi degli anni settanta dalla Lockeed su un modello militare l'AH 56, era costituito da una sorta di giroscopio montato sulla testa del rotore, collegato a sua volta alle articolazioni del cambio passo delle pale. Il ciclico agiva direttamente sullo stabilizzatore Lockeed che a sua volta influenzava l'assetto del rotore mantenendolo stabile. In realtà si trattava di un rotore di tipo semirigido poiché le pale erano sprovviste solo cerniere di flappeggio. La combinazione del giroscopio con il sistema rigido, cioè senza cerniere di flappeggio produce un periodo che va da uno a due secondi di intervento di correzione piuttosto che 10 o 20 di un sistema simile.