Comportamento in volo
La
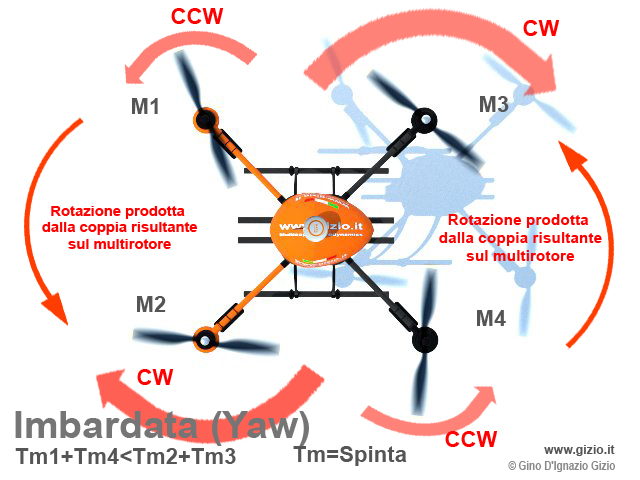
figura sotto mostra come avviene l'organizzazione e lo schema di rotazione
dei rotori di un quadcoptero. Il rotorI 1 e 4
hanno una rivoluzione oraria (CW ClockWise) mentre i
rotori 2 e 3 hanno una rivoluzione antioraria
(CCW CounterClockWise).
Ogni rotore produce una spinta ed una coppia che si genera sull'asse Z,
cioè nel centro di rotazione di ognuno di essi, allo stesso modo
ogni motore ed ogni singolo rotore producono una o più forme di
resistenza. La combinazione di queste forze contrastanti è responsabile
della estrema instabilità del multirotore durante il volo.

Volo stazionario (hovering)
Il
volo di un multicoptero risponde al terzo principio della dinamica
che recita: ad ogni azione corrisponde sempre una uguale ed
opposta reazione. Questo princpipio varrà come vedremo
per molti aspetti funzionali di questa macchina, come il generarsi della
coppia ad esempio; prima tra tutte però la legge di Newton
è coinvolta nello stesso principio del volo di un multicoptero.
Un elicottero o un multirotore volano attraverso un lavoro prodotto dai
motori sui rotori che spingono una notevole quantità di aria al
di sotto della macchina, pari o superiore al peso di essa. Questa azione
genera una reazione uguale e contraria, attraverso la quale la macchina
si stacca dal suolo iniziando la sua fase di galleggiabilità
aerea. Per mantenersi in volo la macchina è costretta
a spendere una quantità di energia tale da sostenere il suo peso
attraverso la spinta dei rotori. In altre parole affinchè un multicoptero
di 3kg possa essere in grado di volare, i suoi motori
dovranno produrre una spinta pari o superiore al suo peso per ogni secondo
di volo, e la potenza dovrà essere uguale per ogni motore come
semgue Tm1=Tm2=Tm3=Tm4, poichè per mantenere un
equilibio in assetto i rotori dovranno esercitare la stessa identica spinta
verso il basso.
In caso di ascenzione allora la spinta aumenterà superando il peso della macchina fino ad una massima possibile, che sarà strettamente legata alla potenza massima disponibile che i motori possono erogare, ma altri fattori rendono le cose un po più complesse di quanto sembrano, tra cui alcuni elementi metereologici, come temeperatura e densità dell'aria, che possono modificare sensibilmente le prestazioni dell'aeromobile.
Affinchè
il multicoptero possa iniziare il volo; in questo caso stazionario,
cioè mantenendo un punto stabile sulla sua verticale, tutti i rotori
che lo compongono devono produrre una quantità di spinta uguale
tra loro, la cui somma sarà in grado di mantenere perfettamente
la piattaforma orizzontale. In teoria è intuibile il fatto che
i rotori debbano produrre una spinta uguale tra loro, ma in pratica questo
non è esattamente vero, poichè moltissmi fattori influenzano
l'efficienza dei rotori, generando una sensibile differenza tra loro che
è la causa della naturale instabilità di questa macchina.
Ogni rotore produce una serie di momenti; si generano resistenze aerodinamiche
che interessano sia la struttura stessa dell'elica portante, sia la struttura
del multicoptero, poichè il flusso di aria lo attraversa generando
turbolenze, inoltre ci sono fattori ulteriori anch'essi contribuenti alla
instabilità dell'aeromobile come l'inerzia dei motori e dei rotori,
e poi la coppia stessa che si genera sia sui rotori, che influenza anche
la stessa struttura che li ospita. Tutti questi fattori contribuiscono
ad aumentare i problemi di instabilità.

Le forze che si generano sono continuamente differenti tra loro e variabili nei punti e nei valori, e questo avviene diverse volte al secondo. Infatti pur mantenendo i motori perfettamente sincronizzati, il multicoptero non potrà mai tenere un assetto stabile ed ordinato, ma comincerà a subire l'azione della somma e della differenza delle molteplici forze e momenti, che si stanno generando ogni secondo, con un andamento dinamicamente instabile sempre più crescente, che descriverebbe una traiettoria finale irregolare fino al ribaltamento del multirotore.
L'autopilota in questo senso interviene in modo tale da calcolare algoritmicamente la necessaria correzione da effettuare su ogni singolo rotore, variando in continuazione la velocità singola di ogni motore, in modo tale da mantenere l'assetto del velivolo perfettamente livellato sull'orizzonte. Si può verificare questa azione correttrice ascoltando attentamente il suono dei rotori, che varia in continuazione su ogni singolo rotore, oppure filmando il multicoptero con una videocamera in modo tale da osservare la rotazione dei rotori, che grazie ad un effetto dovuto alla velocità di otturazione della camera, vi permetterà di notare che i rotori varieranno in continuazione la loro rivoluzione, poichè l'autopilota interviene con delle correzioni precise, in modo da mantenere la macchina sempre perfettamente orizzontale in volo stazionario.
Riassumendo: Gli attori fondamentali che tengono in volo un multicoptero sono la spinta (Ps) che contrasta il peso (Q). Se la spinta (Ps) è uguale al peso (Q) si avrà il volo stazionario o hovering (Ps=Q). Se la spinta (Ps) sarà maggiore del peso (Q) allora si avrà la salita (Ps>Q). Se la spinta (Ps) sarà inferiore al peso (Q) allora si avrà il volo in discesa (Ps<Q). Il volo di un multicoptero si ottiene sommando la spinta totale di ogni singolo rotore. Se ogni rotore è in grado di produrre una spinta pari a 750 grammi, (Tm=750gm) ed il multirotore è dotato di quattro motori, allora la spinta massima disponibile sara di 750g . 4 = St (Spinta totale) pari a 3000g (Sp=Tm*4)
Imbardata (Yaw)
Sempre
secondo il terzo principio della dinamica già citato sopra, a
proposito di azione e reazione uguale e contraria, quando una massa
è sottoposta a rotazione essa genera automaticamente una coppia,
cioè una forza di uguale intensità e contraria nella direzione.
La coppia è una forza con direzione opposta al senso
di rotazione di un corpo dunque essa è tanto più
importante per noi, sopratutto per il fatto che essa si genera sul piano
rizzontale. Quattro rotori ruotando con una velocità
angolare (ω) generano
quattro coppie, ed il senso di direzione delle coppie generatrici è
sempre opposto a quello di rotazione di ognuno dei rotori. (Vedi
Coppia Elicottero).
Giacchè ogni rotore genera una coppia nella direzione opposta
di rotazione, risulta intuitivo comprendere che per mantenere la direzione
di un multicoptero stabile, esso debba essere dotato di un numero di
rotori pari con rivoluzioni contrapposte, in modo da poter contrastare
e quindi annullare la coppia del rotori aventi rivoluzione opposta.
A questo punto tenuto conto della somma delle coppie degli uni in un
senso e la somma degli altri nel senso opposto di rotazione, si dovrà
avere una risultante uguale a zero sull'asse Z del
multirotore.
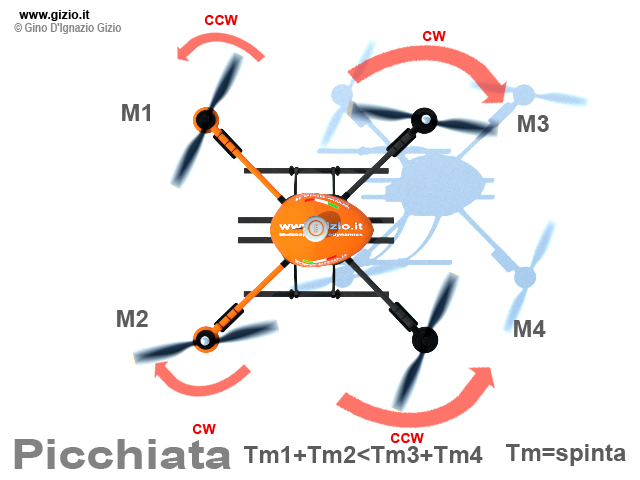
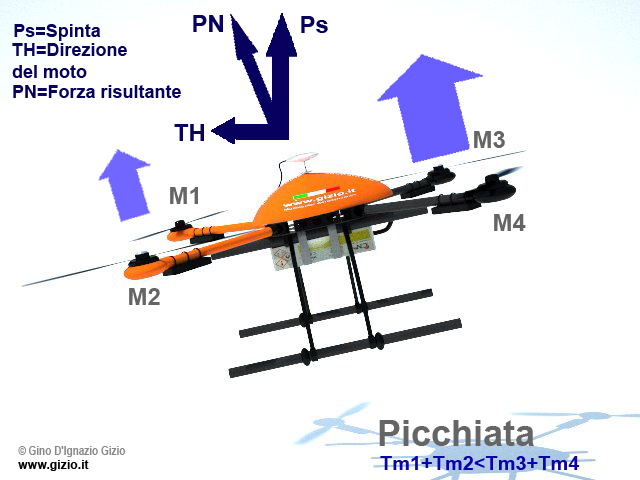
Per poter modificare la direzione del multirotore l'autopilota dovrà creare una differenza delle spinte tra le coppie dei motori CCW rispetto a quelle di quelli CW. La differenza di spinta tra le due coppie produrra una rotazione del multicoptero nella direzione opposta alla coppia di rotori, che hanno subito un aumento della potenza, rispetto alla coppia opposta che invece hanno ridotto in proporzione la spinta stessa, proprio perchè la coppia è una forza che si genera sempre nella direzione opposta di moto, cosi come segue: (Tm1+Tm4<Tm2+Tm3).
Per poter effettuare una rotazione in una data direzione, l'autopilota diminuirà la spinta su una coppia laterale di rotori, aumentando quella della coppia opposta. La coppia risultante si muoverà nel senso opposto a quella della direzione di rotazione della coppia di rotori dominanti, cioè di quelli che hanno aumentato la loro spinta. Poichè si avrà una coppia maggiore rispetto ad una coppia di rotori, l'intera struttura comincerà a ruotare nel senso opposto, ottenendo la manovra di imbardata. In un elicottero avviene la stessa cosa, ad opera però del rotore anticoppia in coda, che esercita una forza costante sul tronco posteriore, per annullare la coppia che si genera sull'asse Z dell'elicottero. Esso può aumentare o diminuire la sua spinta, in modo da diminuire o aumentare la coppia dell'elicottero, dando la possibilità al pilota di effettuare una imbardata controllata.
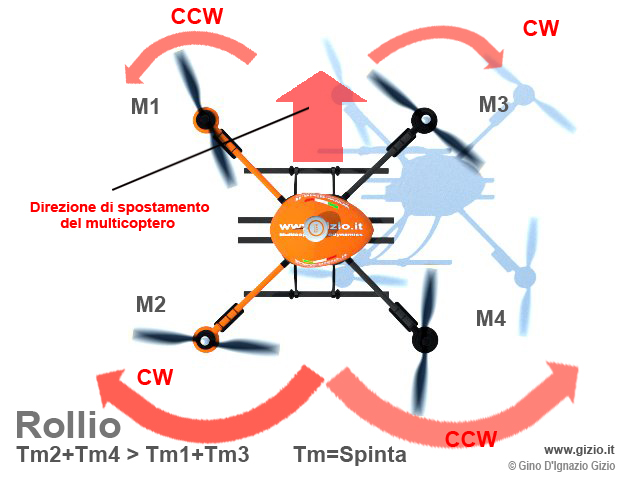
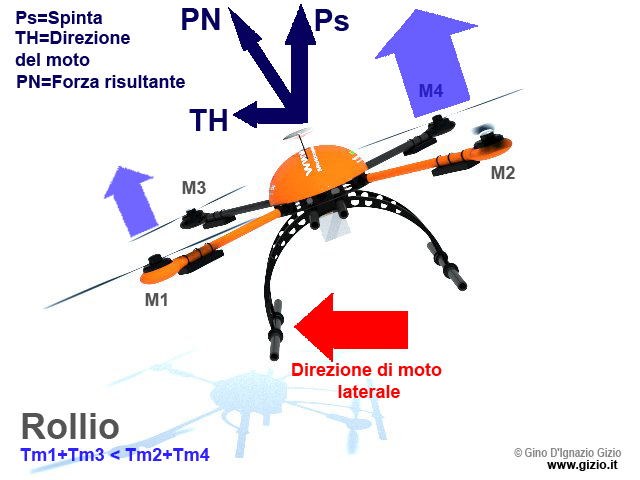
Rollio
Per ottenere il volo traslato in una qualsiasi direzione è necessario aumentare la spinta dei rotori opposti al senso di direzione desiderata, diminuendo viceversa la spinta dei rotori situati sul lato stesso della direzione della spinta, cosi da produrre uno spotamento laterale della massa della macchina che causerà il movimento nella direzione desiderata, dunque (Tm1+Tm4>Tm1+Tm3).