Storia
Non
esiste una storia precisa di questo tipo di aeromobile, ci sono piuttosto
salti storici e tecnologici, è comunque in quanto macchina volante
classificata come aeromobile multirotore. Tuttavia nel nostro caso tratteremo
solo i passi più importanti dei velivoli a decollo ed atterraggio
verticale, in modo particolare di quella categoria di cui io mi occupo
da anni, (VTOL) faremo una analisi di due principali
concetti interessanti, in due distinte sezioni.
La prima analisi verrà rivolta a quelle macchine dotate di più
di due rotori, quei prototipi che hanno incominciato a spianare la strada
involontariamente a quelli che qui vengono definiti multirotori
o multicopteri, e che a molti appaiono come
una novità. La seconda parte invece verrà indirizzata a
macchine a controllo remoto, che vengono definite con il termine di droni,
cioè velivoli con controllo a distanza e che in un modo o in un
altro hanno dato un contributo tecnologico importante arrivando fino ai
giorni nostri con tecnologie prima impensabili proprio quando un drone
si è trasferito per incanto dal settore militare a quello civile,
poichè le origini dello sviluppo di questa idea erano esclusiva
delle forze militari solo fino a pochi anni fa.
Multirotori
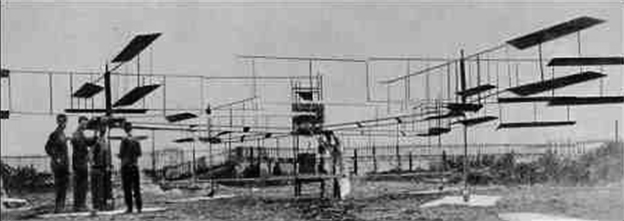
La
prima apparizione di una macchina dotata di quattro rotori disposti su
una struttura a croce fu il Giroplano inventato da Luis
e Jacques Breguet nel 1907. La struttura
del Gyroplane era composta da una sorta di gabbia di
acciaio dalla quale si diramavano quattro braccia che sostenevano ogniuna
una coppia di rotori biplani. Al centro della struttura vi era il pilota
ed il motore che era connesso con i ritori attraverso delle cinghie. Il
Giroplano effettuò una serie di voli raso terra, e poichè
era difficile controllarne l'assetto degli uomini a terra lo tenevano
per gli spigoli impedendogli di scivolare in una direzione senza controllo.
|
|
Gyroplane |
|
|
Alcuni
anni dopo, nel Gennaio del 1921, quando i motori cominciavano
ad essere più efficienti e la meccanica sempre più elaborata,
cosi pure lo studio dell'aerodinamica, apparve il De
Bothezat. Fu l'esercito americano che firmò
un contratto con George De Bothezat ed Ivan Jerome
per lo sviluppo di una macchina a decollo verticale. Ancora una volta
apparve una struttura ad X, del peso di 1678
kg. Il pilota ed il motore erano al centro della struttura stessa,
dalla quale quattro braccia di acciaio di nove metri sostenevano quattro
rotori provvisti di sei pale con un diametro di 8 metri circa. Alla estremità
delle braccia laterali vi erano delle piccole eliche che erano addette
al controllo dell'imbardata. La cosa interessante è che ogniuno
dei rotori era dotato di meccanismo collettivo, cosichè il pilota
poteva dirigere la macchina in qualsiasi direzione. Al primo decollo il
De Bothezat pesava 1700 kg ed il primo
volo fu eseguito nell'Ottobre del 1922. |
|
|
|
De
Bothezat (video) |
|
|
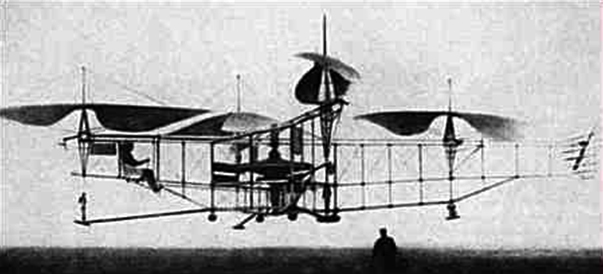
Etienne
Oemichen era un giovane ingegnere della Peugeot,
inizio una serie di esperimenti che lo portarono poi a progettare nel
1920 una serie di macchine a decollo verticale. La prima
macchina fu un vero fallimento poichè non riusci a produrre una
portanza tale da sostenersi in volo, era un aeromobile con due rotori,
e non riuscendo ad ottenere il risultato in cui sperava applicò
due palloni sulla sua sommità, per aumentare la spinta. Tuttavia
con l'elicottero Numero 2 provvisto di quattro rotori
con una struttura ad X, ed otto eliche, mosse da un motore
di 120hp riusci a sollevarsi in volo per la prima volta
l'11 Novembre del 1932 |
|
Oemichen
elicopter N2 |
|
|
Il
W11 Cierva è il primo esempio di tricoptero
della storia, più o meno simile ai piccoli multicopteri tri-motore.
Era alimentato da un solo enorme motore stellare, che era collegato attraverso
un complesso sistema di trasmissione ai tre rotori per mezzo di lunghi
alberi articolati. I rotori erano sistemati su due bracci laterali, ed
un terzo sulla testa anteriore della fusoliera. Tutti e tre i rotori giravano
nella stessa direzione in senso antiorario, tuttavia per compensare l'effetto
della coppia - che analizzeremo più nei dettagli nelle nostre
piccole macchine - i tre rotori erano inclinati in modo tale da compensare
la forza torcente della coppia. Ogniuno dei rotori era articolato, provvisto
di collettivo e ciclico, ed il gigantesco motore stellare era posizionato
sutto il centro di gravità; poco dietro il cockpit. La fusoliera
era progettata per caricare almeno 24 passeggeri. Il
primo volo avvenne nel Dicembre del 1948, tuttavia le
prestazioni ed i costi di questa macchina ne impedirono l'ulteriore sviluppo. |
|
W11
Cierva |
|
|
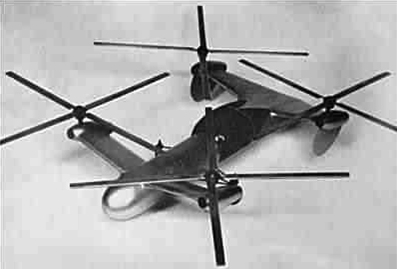
Dopo
un precedente tentativo fatto nel lontano 1923 da Bothezat
è la volta degli USA con una macchina
a quattro rotori, chimata Modello A o Convertawings
costruita nel 1955 e che volo finalmente con successo
con ben due prototipi costruiti. Un ennesimo esempio di quadcoptero con
quattro rotori montati su bracci laterali a coppie, disposti in prua ed
in coda connessi ad un telaio a traliccio di acciaio, al centro del quale
vi era il pilota. I motori erano due e sistemati rispettivamente al di
sotto dei raccordi dei bracci rotore, che erano connessi con questi mediante
cinghie, i due sistemi di propulsione erano inoltre connessi tra loro
attraverso un albero di trasmissione che garantiva una notevole sicurezza
in caso di piantata di uno dei motori. Il controllo della macchina avveniva
attraverso una leva che a seconda della posizione variava l'angolo di
attacco collettivo dei rotori in maniera indipendente, cosi da ottenere
il volo in tutte le direzioni. Anche qui si applica il principio della
differenza di coppia tra i rotori per ottenere il controllo dell'imbardata,
come vedremo in seguito nei capitoli successivi. |
|
|
|
Modello
A Convertawings |
|
|
Nel
1957 un nuovo e rivoluzionario progetto viene elaborato
per le forze dell'aviazione americana. L'idea finale era di costruire
il primo convertiplano, poichè i quattro rotori avrebbero potuto
inclinarsi in avanti per trasformare il volo da verticale ad orizzontale.
I quattro rotori erano situati alle estremità delle ali ed erano
alimentati da due turbine Boeing 502, in quegli anni
infatti il motore a turbina faceva la sua comparsa sugli elicotteri. Il
Convertawings rimase tuttavia solo un progetto, di cui
solo le ali con le articolazioni per i rotori furono realmente costruite
e testate al banco, la macchina pesava a pieno carico 19380 Kg,
ma non ebbe ulteriori sviluppi. |
|
|
|
Convertawings |
|
|
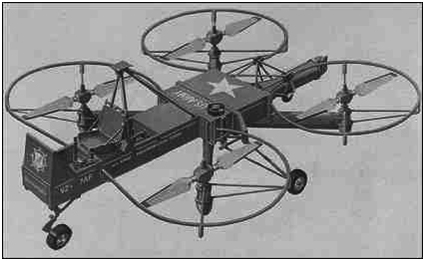
Il
Curtiss-Wright VZ7 fu un idea concepita per l'esercito
americano, una sorta di Jeep volante che si guadagnò
un contratto che fu onorato con due proptotipi nella metà del 1958.
Anche in questo caso si trattava di un quadcoptero molto
semplice nella struttura e leggero, con una fusoliera scatolata al centro
ed il sedile del pilota in posizione anteriore. Dal centro della fusoliera
si diramavano i quattro bracci di sostegno dei quattro piccoli rotori.
Il motore era una piccola turbina Artouste IIB conosciuta
perchè impiegata anche su alcuni elicotteri francesi di quegli
anni con successo. La turbina erogava una potenza di 425 CV.
I rotori erano protetti da una arco di metallo, ed il controllo molto
semplice era prodotto dalla variazione di spinta dei rotori attraverso
un sistema di articolazione collettiva, mentre il controllo dell'imbardata
avveniva deviando il flusso di scarico della turbina nella direzione opposta
a quella di rotazione. Oggi si potrebbe dire che ricorda molto i multirotori
che siamo abituati a vedere in volo. |
|
|
|
Curtiss-Wright
VZ7 |
|
|
Il
Curtiss-Wright X19 da iniziò alla complessa avventura
per lo sviluppo di un velivolo commerciale executive, con una capacità
di caricare quattro passeggeri, in grado di raggiungere una notevole velocità
ed interessanti prestazioni. Anche questo è il caso di un quadrirotore.
La Curtiss-Wright era la maggiore industria bellica aeronautica
durante la seconda guerra mondiale, tuttavia dopo quel conflitto non vinsero
più nessuna gara di fornitura da parte dell'esercito americano,
tuttavia rimasero i migliori per la fabbricazione di eliche. Cosi fu fondata
una divisione che si occupasse di sviluppare una elica adatta sia al volo
verticale sia a quello orizzontale, in grado di raggiungere una notevole
velocità. Il principio di volo di questa macchina sfruttava l'idea
della portanza radiale, di cui parleremo in uno dei capitoli successivi.
Il Curtiss-Wright X19 non ebbe una lunga
storia, ma spianò la strada al futuro convertiplano. |
|
|
|
|
|
|
L'X22
a mio parere è una delle macchine più interesanti di questo
tipo, alcuni dei miei progetti infatti si basano sull'esperienza tecnica
raccolta con lo sviluppo di questo aeromobile. Anche in questo caso di
tratta di un quadcoptero, ma con rotore intubato per migliorare le caratteristiche
aerodinamiche delle pale riducendo drammaticamente il fenomeno dei vorcici
marginali di una pala - argomento che tratteremo in relazione alle
eliche. L'X22 era capace di volare sia in modalita
VTOL cioè a decollo ed atterraggio verticali, sia in modalita
aereo, cioè lungo una traiettoria orizzontale. Era una macchina
piuttosto complessa, sopratutto dal punto di vista meccanico, ed ha volato
dal 1966 fino ai primi anni ottanta.
L'X 22 è interessante anche da un altro punto
di vista, poichè è la prima macchina dotata di sistema
di stabilizzazione dinamico simile a quello che noi montiamo
sui nostri piccoli multicopteri. Il sistema di stabilizazione dinamica
è importantissimo in un multirotore, perchè questo tipo
di macchina è in natura molto instabile e richiede un dispositivo
di controllo della stabilità e dell'assetto. Il massimo peso al
decollo era di 7530Kg, tuttavia la macchina era in grado
di caricare molto poco rispetto alle possibilità immaginate, con
una capacità massima di 540kg oppure sei passeggeri.
Ho avuto modo alcuni anni fà negli USA di vedere
questa macchina da vicino ora conservata al museo di storia dell'aviazione
e dello spazio di Wanshington. |
|
|
|
|
|
|
Il
WG21 della Aerotechnik costruito nel
1968 come monoposto ed un secondo nel 1970
biposto, è un ulteriore esempio di quadcoptero nella storia. Si
trattava di un quadcoptero a croce montato sulla testa
di un telaio che comprendeva un sedile ed il motore, che trasmetteva il
movimento meccanico ai quattro rotori in testa, attraverso degli alberi
di trasmissione. Le pale del rotore erano di tipo semirigido e provviste
di articolazione del collettivo che variavano a seconda
della posizione della cloche centrale l'azione della spinta laterale.
E' interessante a proposito di questa macchina, il fatto che fu da questo
momento applicato il principio di differenzazione della coppia
tra le coppie di rotori che giravano in senso orario rispetto a quelli
che invece avevano una rivoluzione opposta, che come vedremo è
uno dei capitoli tra i più importanti che regolano fisicamente
il volo dei piccoli multirotori elettrici che conosciamo oggi. |
|
WG21
Aerotechnik |
|
|
Il
CellCraft G150,
progettato nel 1996 quando già ero pilota di elicotteri
immaginando la possibilità di costrure una macchina a propulsione
elettrica ispirata però per alcuni aspetti al Bell X22,
ma molto più semplice ed efficiente. Il G150 è
stato storicamente il primo progetto concettuale di aeromobile a propulsione
elettrica al mondo assieme al DDRH sviluppato in contemporana.
Entrambi erano aeromobili monoposto concepiti in alluminio e materiale
plastiche. Il G150 in particolare era dotato nella sua
configurazione iniziale di un motore a turbina connesso con un generatore,
una sorta di APU, che produceva l'energia elettrica necessaria
al funzionamento di tutto il sistema, sopratutto degli otto motori a sogliola
a variazione di frequenza situati in ogni gondola, connessi a dei rotori
a sei pale in fibra di carbonio. L'idea principale era ed è ancora
oggi di sostituire con cavi e sistemi di stabilizzazione dinamica, quello
che un tempo era rappresentato da pesanti e complesse trasmissioni meccaniche,
che purtroppo limitavano fortemente le prestazioni di macchine come il
Curtiss, o il Bell X22. Il G150
era dotato di una specie di schermo tattile molto primitivo se confrontato
a quello di cui la tecnologia ci può offrire, e di un sistema di
interazione macchina-pilota. Poteva decollare in modalità VTOL
e volare in modalità aereo, poichè i quattro rotori intubati
erano in grado di ruotare di 90° in avanti. Il G150
aprì la strada ad altri successivi progetti più importanti
che ancora oggi proseguono nel loro sviluppo ed è stato
il primo concetto di velivolo VTOL a propulsione elettrica al mondo, almeno
a livello concettuale. |
|
|
|
CellCraft
G150 |
|
|
Nel
2003 iniziavo la messa a punto di un progetto molto più
complesso ed elegante, dopo aver attraversato una serie di studi trasversali,
abbandonando per un po il concetto di multirotore intubato. Nel 2003 ripresi
in mano il vecchio concetto di motori elettrici intubati ritornanto all'origne
e cioè al vecchio G150 e viene al mondo prima
il CellCraft G445
e poi nel 2005 il CellCraft
G450-55, una macchina più grande, dalla capacità
operativa eccellente, migliorata nella struttura e nella tecnologia, provvista
di otto motori ad induzione a controllo digitale brushless, che muovono
quattro rotori articolati a sei pale in carbonio intubate nella versione
G450, e otto rotori controrotanti nella versione G455.
La macchina aveva una capacità di trasporto di 5 passeggeri
con una velocità di oltre 455 Km/h in modo
A. Il G450-55 era provvisto di due unita MPU
simili a quelle del G150, ed erano sistemate risettivamente
una nel muso e l'altra nella sezione di coda, con una potenza totale di
980 Hp. Dotata di sistemi dinamici del controllo del
volo e della sicurezza stessa del velivolo, un elevato livello di interazione
pilota-macchina e perfino un sistema di auto pilotaggio in grado di intervenire
laddove il pilota superasse i limiti strutturali o di sicurezza del velivolo
per correggere assetto e comportamento automaticamente, inoltre sin dal
G150 una unita a ioni di litio garantiva una durata di
volo di circa dieci minuti, sufficienti ad effettuare un atterraggio di
emergenza in caso di piantata di entrambi gli MPU. Anche in questo caso
il G450-55 è il primo velivolo multirotore a propulsione
elettrica ideato per il trasporto passeggeri al mondo. Ulteriori progetti
sono susseguiti oltre il G450-55 ancora in corso di elaborazione.
Tuttavia il principio di funzionamento di questa macchina era in buona
sostanza identico a quello del G150. Un ulteriore punto
a favore di questi progetti è dato dalla completa rivisitazione
architettonica del concetto stesso di aeromobile che si intravede dalla
sua forma estremamente aerodinamica con body-lifting cioè fusoliera
parzialmente portante. |
|
|
|
CellCraft
G450-55 |
|
|
Nel
2011 il team tedesco di E-Volo tenta
per la prima volta di costruire con successo un multirotore pilotato da
uno del team che riesce a staccarsi dal suolo con successo per una decina
di minuti di volo, provando che la propulsione elettrica è possibile.
Più tardi nel 2013 il team costruisce una macchina
più raffinata con una elegante fusoliera ed inaugurano il velivolo
con un volo radiocontrollato all'interno di un hangar. Il progetto e-volo
è un ottima rottura del sistema attuale per quanto riguarda gli
aeromobili convenzionali, tuttavia non credo che tanti piccoli motori
possano diventare lo standard perchè ne aumenterebbe le probabilita
di malfunzionamento oltre che la complessità somiglia ad un multicoptero
convenzionale, solo in scala più grande. |
|
|
|
|
|
|
Nel
2014 rispolverando alcuni progetti di aeromobili progettati
alcuni anni prima con rotori elettrici rigidi, cioè non basculanti
come il CellCraft, riproposi due progetti ad un gruppo
di ricerca brasiliano, in modo particolare il modello EJ140
un quadrirotore a rotori elettrici e pale in carbonio. La struttura era
molto semplice ed interamente costruito in fibre di carbonio ed alluminio.
L'ElettroJet 140 era provvisto di sistemi di stabilità
dinamici ed era perfino in grado di atterrare e decollare in modalità
automatica inoltre delle semiali fornivano una consistente percentuale
di portanza riducendo il consumo di energia in volo traslato. Il progetto
non ebbe seguito per mancanza di fondi strutturali necessari a reallizzare
il primo prototipo. |
|
|
|
ElettroJet
140 |
|
|
Nello
stesso anno sviluppavo il progetto più piccolo l'EJ110,
più compatto provvisto della stessa elettronica e lo stesso MPU
del 140, con una potenza erogata di 230 Hp
sul generatore ma più leggero nel complesso. Il velivolo era monoposto
e compatto, in grado di atterrarre e decollare anche in modalità
automatica, inoltre era dotato di struttura rotore pieghevole por poter
essere stipato in un piccolo spazio. Questo progetto è al momento
in fase di promozione in cerca di fondi per poter sviluppare un prototipo. |
|
|
|
ElettroJet
110 |
|
|
Nello
stesso anno venivano sviluppati due progetti paralleli per lo studio di
un aeromobile della stessa tipologia ma con una capienza in numero di
passeggeri di almeno 4 persone. Anche in questo caso la fusoliera era
composta di elementi di carbonio ed alluminio incollati tra loro, tuttavia
sia il EJ440 disegnato per l'impiego nelle forze di polizia,
sia il EJ450 concepito esclusivamente per l'impiego civile
sono provvisti di due unità MPU identiche che
assolvono in modo intelligente all'erogazione della potenza necessaria.
poichè può essere utilizzata per il volo anche solo una
unità, per esempio nel volo senza carico, a macchina leggera per
economizzare sul consumo. Gli aeromobili sono entrambi molto leggeri ed
i generatori possono bruciare anche bio carburante, o diesel aeronautico
cosi come i precedenti modelli. |
|
|
|
ElettroJet
440 |
|
|
DRONI
(Velivoli a controllo remoto)
Il
Vertol NASA Tilt Wing del 1959 è
in assoluto il primo drone multirotore mai costruito nella storia, oltretutto
è anche il primo multicoptero a propulsione elettrica, dotato di
ben sei motori elettrici montati su un'ala basculante, che permetteva
il decollo e l'atterragio verticali ed il volo tralsato come quello di
un aeroplano. I motori erano a frequenza variabile, e per questo ricordano
molto i motori oggi in uso, essi potevano sviluppare un migliaio di cavalli
di potenza disponibile. Purtroppo questo progetto non proseguì
oltre, e si può chiaramente immaginare perchè, forse a causa
del limitatissimo tempo di funzionamento che rimane ancora oggi un limite
da superare. |
|
|
|
Vertol
NASA Tilt Wing |
|
|
Nel
1956 il Gyrodyne QH-50 entra ufficialemnte
nella competizione per la produzione di un elicottero monoposto per operazioni
di sabotaggio in mare ed osservazione per il supporto in battaglia. Tuttavia
la tendenza successiva nel 1961 fu quella di optare per
un elicottero a controllo remoto armato di due siluri con un rotore assiale
controrotante. Inizialmente la macchina fu dotata di un piccolo motore
di 40hp che fu rimpiazzato poi da un motore Porsche
di 60hp ed un motore a turbina più tardi. In tutto il
periodo di sperimentazione ne furono prodotti 60 impiegati
per operazioni navali. |
|
|
|
|
|
|
|
|
Il
Westald Wisp è stato il primo drone a controllo
remoto compatto, progettato come osservatore, provvisto di una telecamera
ed una camera ad infrarossi in grado di inviare immagini ad una stazione
di controllo, che funzionava sia di giorno che di notte. Il Wisp
era dotato di due motori a due tempi bicilindrici. Il suo primo volo avvenne
nel 1976 su tre differenti prototipi, tuttavia i test
fatti nell'anno successivo provarono che il carico portante era piuttosto
esiguo ed il progetto fu abbandonato. |
|
|
L'Eagle
Eye era un birotore con architettura convertiplano con potenzialità
VTOL e controllo remoto per missioni a medio raggio.
La struttura principale era in materiale composito, con un carrello
di atterraggio retrattile all'interno della fusoliera, che conteneva
anche il sistema propulsivo ed il controllo di volo.
Nel
1997 l'Eagle Eye era già considerata una macchina
molto avanzata e date le sue capacità di volo i componenti che
alloggiava richiedevano un accurato posizionamento al suo interno. Il
motore era una turbina Allison C20, situata nel centro
di gravità del velivolo e connessa mediante trasmissione ai due
rotori laterali. Le ali contenevano gli alberi di trasmissione ed il
sistema di rotazione delle due gondole sulle quali vi erano i rotori.
Questo drone rimase in servizio sperimentale fino alla metà degli
anni duemila.
|
|
|
La
Bombardier oltre a produrre uno dei più famosi
aerei come il CRJ è stata anche coinvolta nello
sviluppo di droni a controllo remoto come il Guardian.
Una successiva versione migliorata chiamata Sentinel
ricalcava per alcuni versi una macchina risalente al 1964.
Nel 1998 il CL227
si inserisce tra i migliori droni VTOL del settore
militare. Dotato di un rotore assiale controrotante bipala, fu tra i
primi tre velivoli che superarono la selezione della marina come dimostratore.
Purtroppo dopo oltre 50 ore di volo alcuni problemi
tecnici cominciarono ad emergere fino alla perdita di un esemplare caduto
per mancanza di carburante poichè aveva perso il serbatoio in
volo. Fu impiegato tuttavia dalla marina Australiana durante la sua
sperimentazione.
|
|
|
Anche
Sikorsky si inserisce in una schiera di sviluppatori
Di droni con caratteristiche VTOL, del resto uno dei
più grandi produttori di elicotteri non poteva essere assente in
questo settore industriale.
Il Cypher ed il MARINER furono senza
dubbio tra i migliori droni sperimentati in quel periodo che va tra il
1998 ed il 2000. Molto semplici nella
struttura con un piccolo rotore assiale controrotante a quattro pale inserito
in una struttura a ciambella costruita in graffite e resina epossidica.
In grado di tracciare e seguire una sagoma a figura umana, fu anche utilizzato
per scoprire dei tunnel in Nevada per il dipartimento dell'energia. Nella
versione successiva,( il MARINER CyherII,)
ebbe una configurazione per raggio esteso e sviluppata in collaborazione
con la General Dynamics, per il sistema di informazione
dei sistemi di volo. Il Mariner viene conosciuto anche
come Cypher II ed è stato per alcuni anni nel
programma di sperimentazione da parte della Marina Americana, poichè
soddisfava i requisiti di carico utile, oltretutto nella nuova versione
fu dotato di due superfici alari ed una elica spingente in coda, la fusoliera
era anche dotata di un piccolo carrello di atterraggio. La capacità
di carico era di 45lb (18Kg) ad una
stazione posta a 100mn (185 km), con una autonomia di
due ore di volo. La macchina pesava intorno ai 100kg
a pieno carico, e raggiungeva una velocità massima di 230Km/h,
ma il costo era elevatissimo al di sotto dei 5$ milioni
per due esemplari con quattro stazioni a terra dal costo di 3,76$
milioni di dollari.
|
|
Cypher
II MARINER |
....e la
storia continua.....
©Gino
D'Ignazio Gizio
|
|