Sistemi di controllo e stabilizzazione
I multirotori sono assolutamente INSTABILI in natura,
nonostante essi appaiano estremamente stabili in volo, ma questo è
dovuto principalmente al sistema di stabilizazione dinamca o Autopilota.
Si tratta di un dispositivo relativamente complesso composto da diverse
componenti, è in altre parole il cervello sensoriale principale
del multirotore poichè provvede alla correzione ed al mantenimento
bilanciato dell'assetto e della direzione. Senza questo dispositivo
il multirotore non è in grado di volare correttamente infatti
richiede un sistema elettronico che sia in grado di gestire le forze
e le reazioni costantemente variabili che si generano su ogni singolo
motore instantaneamente,
affinchè la macchina possa mantenere un comportamento omogeneo
sia sul piano orizzontale che direzionale.
La posizione di questo elemento deve sempre essere esattamente al centro dell'intersezione, tra i tre assi di rotazione X,Y,Z, cioè esattamente nel Centro di Gravità (CG) dell'aeromobile. Una posizione diversa a bordo della cellula preclude la stabilità della macchina, inoltre è importante tenere conto del senso di orientamento dell'autopilota, poichè il velivolo potrebbe dirigersi in una direzione opposta a quella che si spera.
Nei primi tentativi di costruire macchine moderne con multirotori come il Curtiss-X19 (video) la grande difficoltà da affrontare fu quella di trovare una soluzione pratica per aiutare i piloti a mantenere la macchina stabile in volo, sopratutto in volo orizzontale stazionario. Una di queste fu di inclinare i rotori rispetto al piano orizzontale, sia frontalmente che lateralmente, verso l'interno ed in avanti alla fusoliera, questo ridusse sensibilmente l'instabilità, specie in effetto suolo. Tuttavia entrambi i piloti erano comunque piuttosto impegnati nel cercare di mantenere assetto e direzione. Furono ideati anche degli speciali dispositvi di controllo automatico gestiti da un giroscopio ed un calcolatore che regolasse il passo delle pale di ogni rotore in modo da mantenere l'assetto stabile come avvenne sull X22 (video), tuttavia l'insisitenza di configurare quelle macchine con complesse trasmissioni meccaniche ne penalizzava anche il carico utile e le prestazioni.

IMU (Unità di misurazione inerziale)
Nei primi esemplari di multirotori che ho costruito a partire dall'Aprile del 2011 la sezione elettronica era composta da diversi componenti separati, in quel perioso DJI NAZA non aveva ancora immesso sul mercato le sue centraline compatte e semplici da assemblare che integravano sensori e dispositivi in un solo elemento, ed io usavo un kit X-Aircraft composto da diversi elementi che andavano collegati tra loro separatamente e la programmazione richiedeva una particolare attenzione specie ai campi magnetici che potevano creare problemi alla taratura del dispositivo.
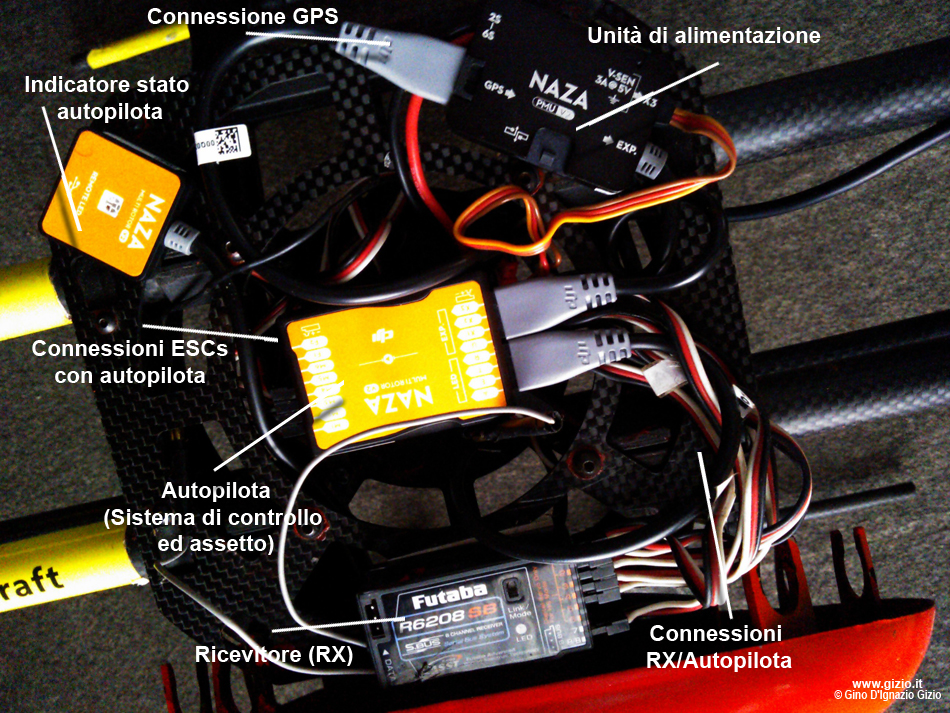
Oggi le macchine sono molto compatte sopratutto dal punto di vista elettronico tuttavia in alcuni multirotori possono esserci dei componenti separati che in genere nei multicopteri più moderni sono tutti racchiusi in una sola unita come le unità NAZA. Un multirotore per poter volare in piena sicurezza sia nel controllo che nella stabilita deve essere provvisto di una serie di elementi che potremmo definire "sensoriali" e che ricordano un po i nostri sistemi di percezione della gravità come avviene all'interno del nostro orecchio attraverso il sistema vestibolare che ci indica cosa va su e cosa va giù, aiutandoci a mantenere l'equilibiro verticale tipico della nostra specie.
IMU (Inertial Measurement Unit) Si tratta di un dispositivo elettronico al cui interno sono installati una serie di dispositivi che segue.
Accellerometro. Si tratta di un dispositivo che rileva le accellerazioni che si generano sui tre assi; per accellerazioni si intendono spostamenti rispetto ad uno stato di quiete che possono avvenire su uno o su tutti e tre gli assi X,Y,Z. Questo dispositivo è in realtà un sensore molto sofisticato ed è quello che mantiene la macchina ferma in volo senza che essa cominci una sorta di walzer aereo ruotando, spostandosi ed inclinandosi senza controllo durante il volo stazionario in modo più evidente. Questo sensore fornisce una serie di dati relativi ai movimenti della macchina trasmettendoli all'unita di controllo principale che attraverso dei calcoli complessi su base algoritmica gestisce la rotazione dei motori in modo appropriato. Dunque possiamo considerare l'unita IMU come una sorta di sistema vestibolare artificiale.
L'unita IMU è anche provvista di un giroscopio elettronico, non si tratta di una unita meccanica come quelle che alcuni piloti come me conoscono come parte dei sistemi inerziali o per esempio di alcuna strumentazione come l'orizzonte artificiale, ma nel nostro caso questo dispositivo ha raggiunto una miniaturizzazione eccellente ed è molto piccolo e sopratutto non è più meccanica, tuttavia la sua funzione rimane identica poichè lo scopo a bordo di un multirotore è quello di misurare gli angoli di rotazione sui tre assi X,Y,Z.
Il Giroscopio è infatti un altro elemento importante per il corretto funzionamento in volo di un multirotore. In origine era un dispositivo molto complesso, di natura meccanica con un rotore costantemente in rivoluzione ad alto numero di giri che sfruttava il principio di precessione, insomma un meccaniscmo molto pesante che richiedeva energia costante. I piloti come me lo ricordano nella vecchia e sempre affascinante strumentazione meccanica perchè era presente in modo particolare nell'orizzonte artificiale. Se vuoi conoscere meglio il principio del funzionamento di un giroscopio puoi visitare questa sezione (Giroscopio). Naturalemnte oggi un giroscopio non è più un dispositivo cosi complesso e pesante come quelli di un tempo, ma è racchiuso in pochi millimetri di spazio e non ha componenti meccanici o parti rotanti al suo interno.
In un capitolo precedente ho spiegato come la rotazione dei quattro rotori genera quattro coppie differenziate e queste siano causa di forte instabilità del volo assieme ai quattro flussi aerodinamici che producono quattro diversi sistemi turbolenti costanti (Quadri-rotore). Queste perturbazioni fanno in modo che il multirotore sia costantemente vittima di esse e questo necessita come abbiamo già visto di una unita IMU che comprenda una serie di dispositivi come vedremo tra cui un Giroscopio che rilevi e misuri gli angoli di assetto durante il volo. Anche in questo caso si tratta di rilevazioni elettroniche che vengono trasmesse all'unita centrale che corregge la rotazione delle eliche in modo tale da controbilanciare con la coppia generata da queste eventuali rotazioni della macchina sui tre assi.
Il funzionamento coordinato del Giroscopio è verificabile attraverso un fenomeno è avvertibile quando ad esempio si pone in volo il multirotore in una posizione stabile di hovering, si nota come i rotori variano costantemente la loro velocità indipendentemente l'uno dall'altro attraverso la variazione del ronzio delle eliche, comportamento che avviene proprio per il meccanismo sopra descritto, e cioè attraverso la misurazione dell'angolo di assetto del giroscopio e dell'accellerometro che insieme misurano accellerazioni e rotazioni sui tre assi della macchina inviandole sotto forma di informazione all'unità centrale, che infatti corregge costantemente la rotazione di ogni singolo rotore in modo tale che la macchina risulti perfettamente livellata in volo.
Un altro elemento importante per garantire il volo di un multirotore anch'esso contenuto all'interno dellìunità IMU è il Barometro. Questo strumento di misurazione rileva la variazione di pressione atmosferica quindi la variazione di quota. Anche in questo caso si tratta di un dispositivo molto piccolo ed integrato, privo di tubicini e valvole o diaframmi come quelli di un tempo. La tecnologia è riuscita ad integrarlo e miniaturizzarlo in piccolissimi circuiti presenti un po ovunque, anche negli orologi per misurare altitudine o profondita in acqua. Un esempio del suo funzionamento è verificabile quando si porta il multirotore ad una determinata quota e lo si lascia librare in un punto nello spazio. Accade che la macchina mantiene asseto (IMU) e direzione (Giroscopio) ma anche quota costante senza scendere o salire ulteriormente (Barometro). Anche in questo caso poiche si tratta di un dispositivo completamente elettronico le misurazioni di variazione di pressione atmosferica vengono trasformate in segnali elettrici con frequenza e forma d'onda specifici ed inviati alla unità centrale che come già descritto gestisce in maniera differenziata la rotazione dei rotori in modo da mantenere assetto (Accellerometro), direzione (Giroscopio) e quota (Barometro).
Spesso all'interno delle unità di controllo vi può essere un Telemetro collegato al Barometro poichè più preciso sopratutto per il volo a bassa quota, oppure vi sono delle piccole telecamere che misurano il contrasto luminoso tra le superifici per evitare collisioni al di sotto della macchina o intorno ad essa.
Un importante elemento sempre contenuto all'interno dell'unita di controllo del volo (IMU) è il Magnetometro. Lo scopo del magnetometro è quello di rilevare i campi magnetici che spesso disturbano il volo. Nei primi velivoli che assemblavo era necessaria spesso la taratura dell'elettronica non solo attraverso la verifica mediante il software ed un computer esterno, ma anche mediante dei movimenti di rotazione che venivano fatti come una sorta di balletto, questo proprio per definire il campo magnetico ed anche per ristabilizzare l'Accellerometro ed il Giroscopio. Poichè il magnetometro è collegato anche esso all'unita centrale e spesso risulta utile anche per la navigazione, poichè è in grado di seguire anche le isobare magnetiche al suolo, infatti quando si cambia zona è consigliabile di effettuare una nuova taratatura del magnetometro che nelle macchine moderne avviene automaticamente nei primi secondi dopo l'accenzione.

Un ultimo elemento integrato spesso all'interno dell'IMU o delle Unita di Controllo di ultima generazione è il GPS (Global Positioning System). Si tratta di un dispositivo elettronico che riceve dei segnali sotto forma di informazioni digitali da due o più satelliti posizionati in orbita geostazionaria, cioè che mantengono sempre la stessa posizione nello spazio rispetto ad un punto fisso sulla terra. Il sistema GPS per quanto comunemente integrato in qualsiasi dispositivo che conosciamo, dagli Smart phone agli orologi, è in realtà un piccolissimo calcolatore elettronico in grado di elaborare la sua posizione in modo più o meno preciso rispetto ad almeno tre satelliti mediante un sistema di computazione trigonometrica. Il ricevitore GPS infatti calcola da distanza che lo separa da almeno tre fonti (satelliti geostazionari) e questo gli fornisce mediante un operazione complessa attraverso algoritmi specifici la sua posizione relativa al suolo.
Nei multirotori più "vintage" come quelli che costruivo alcuni anni fa, come Pegasus in foto, l'antenna del GPS era visibile ed era solitamente posizionata molto vicino al centro di gravità della macchina, era un dischetto bianco sospeso su un piccolo distanziatore che evitava la perturbazione da parte degli altri dispositivi elettronici, anche se nelle verisoni più recenti lo piazzavo proprio al di sopra dell'unità centrale senza riscontrare alcun problema, e questo rendeva il Multirotore più compatto.
Nelle prime versioni i GPS assolvevano a poche funzioni fondamentali, oltre al mantenimento del punto fisso in volo stazionario permettevano all'unita centrale di memorizzare la posizione iniziale di partenza (Home) per poter effettuare il rientro e l'atterraggio automatico del velivolo quando le batterie erano vicine al punto di esaurimento oppure se il pilota intendeva richiamarlo velocemente alla base.
Oggi queste unità sono molto più complesse e sopratutto precise. Cosi come gli altri dispositivi già descritti il GPS è integrato nell'unità di controllo tuttavia l'antenna rimane interna e non è più visibile ormai già nelle prime versioni del DJI Phantom.
Il GPS nei velivoli contemporanei fornisce la posizione nello spazio, è possibile definire una rotta programmata da far eseguire alla macchina atomaticamente, o utilizzare dei punti di rotazione (Turning point) lungo un percorso e perfino osservare la posizione del multirotore in tempo reale su una mappa visibile sul telecomando o su un accessorio esterno come un tablet o un cellulare.
Unità di Controllo
L'unità di controllo o anche spesso chiamato autopilota oggi contiene al suo interno tutti i dispoitivi sopra descritti integrati su di un solo circuito, si tratta di un sofisticato computer che contiene al suo interno un software scritto su una supporto EPROM (una memoria in grado di conservare dati anche senza alimentazione) in altre parole lo stesso tipo di supporto delle classiche pennette. Il software è aggiornabile o modificabile in maniera specifica. Questa unità è il vero è proprio cervello volante di un multirotore. Il software include una interfaccia che ci permette di accedere all'unità con un PC per regolare i parametri in accordo alle operazioni di volo che vogliamo eseguire, oppure comunicare con esso attraverso un radiocomando specifico connesso ad un dispositivo come un table o un cellulare oppure esso stesso provvisto di display multifunzione che riceve moltissime informazione grazie anche ad un sistema telemetrico.
Infatti un ultimo aspetto relativo ai dispositivi a bordo di un multirotore è il sistema di telemetrico e cioè di trasmissione dei dati a due vie, in altre parole le unità di Controllo vengono connesse ad un complesso sistema di ricetrasmissione che muove dati da e per il multirotore rispettivamente al radiocomando di cui tratteremo meglio le caratteristiche. Il sistema telemetrico è in grado di trasmettere sia immagini provenienti dalla telecamera di bordo, sia parametri come velocità, altezza e direzione della macchina ed altre importanti informazioni lungo il periodo di volo.
Un
multirotore può volare in diverse modalità, queste vengono
selezionate a seconda del tipo di volo che si desidera effettuare. Attraverso
uno o più interruttori posizioni posti sulla radiotrasmittente,
ogni funzione è associata ad un canale dedicato, si possono settare
ed attivare o modificare alcune modalità che si preferisce adottare
per il volo. Si può volare in Attitude Mode,
cioè in una situazione in cui il multicoptero mantiene in buona
sostanza la sua stabilità e la direzione, ma è suscettibile
al vento o alla influneza di turbolenze, come quelle che si generano
in effetto suolo (IGE In Groun Effect) e cioè
in prossimità del terreno dove sono necessarie continue e leggere
correzioni per mantenere un punto fisso al suolo.
Oppure si può decidere di attivare il GPS per
stabilizzare perfettamente il volo e mantenere la posizione del velivolo,
perfino in situazioni in cui vi sono condizioni IGE
difficili oppure vento. Si può attivare attraverso lo stesso
comando la funzione Home Returning (rientro
al punto di partenza automatico) qualora necessario, o
infine volare in modalità completamente manuale. Quest'ultima
modalità riduce molto il carico algoritmico della unità
principale di controllo statico, rendendo il volo instabile e difficile
da controllare, si può tuttavia dimostrare utile per piloti esperti
ai fini acrobatici, ma si tratta di una modalità molto rischiosa
e sconsigliata. Anche in questo caso il multicoptero è in realtà
controllato dal software e dai dispositivi interni sopra descritti che
provvedono in associazione con l'Unità di Controllo o Autopilota
a stabilizzare la macchina, tuttavia le operazioni algoritmiche avvengono
al minimo livello e la macchina risulta particolarmente instabile.
Oggi per motivi di sicurezza non è più possibile disporre di questa funzione che rende il volo pericolose ed inaffidabile.
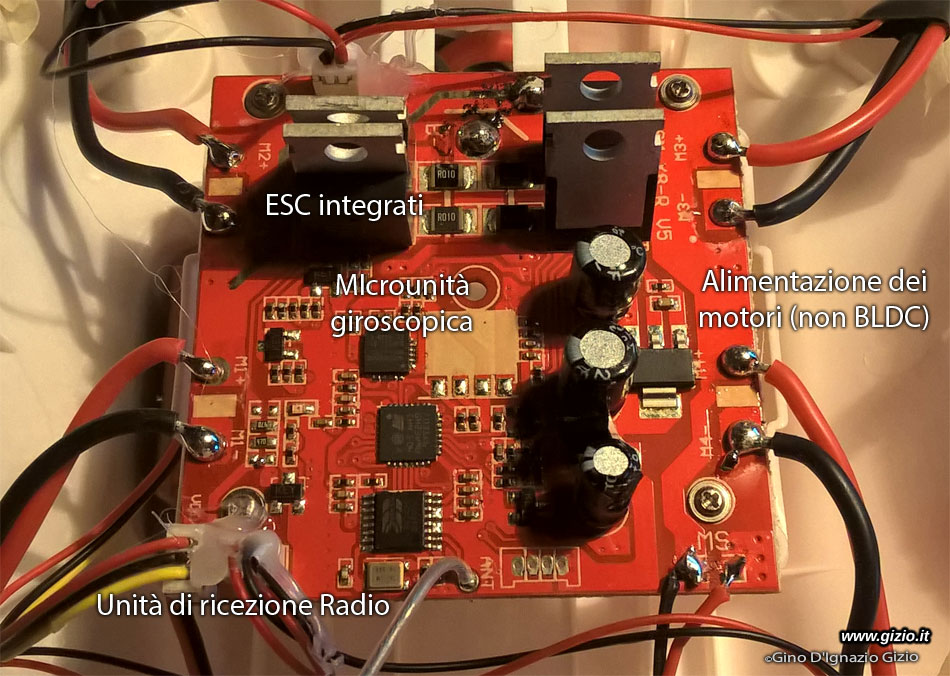
In multirotori più economici o di piccolissime dimensioni le varie unità sono concentrate in un singolo elemento che provvede a tutte le funzioni, questi multirotori sono in genere provvisti di motori convenzionali a spazzole e non posseggono alcun modulo GPS, utili per il volo in-door oppure per imparare a volare con sicurezza.